

Билет 2
Классификация су по принципу управления (управление по возмущению, по отклонению, комбинированные системы).
Для ознакомления с основными видами систем автоматического управления и соответствующей терминологией рассмотрим классификацию САУ по ряду признаков, существенных с точки зрения теории автоматического управления.
Существуют всего два принципа управления. Один из них называется управлением по возмущению, а другой управлением по отклонению.
Рассмотрим, как реализуется принцип управления по возмущению.
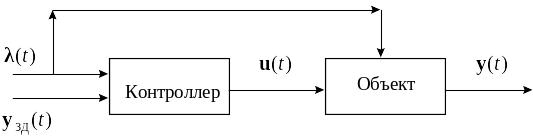
Рис. 1.1. Разомкнутая система управления.
В
этом случае (рис. 1.1) контроллер получает
информацию о цели управления в виде
изменяющегося со временем векторного
сигнала
 и возмущающих воздействиях
и возмущающих воздействиях
 .
На основании этой информации он формирует
вектор управляющих воздействий
.
На основании этой информации он формирует
вектор управляющих воздействий
 таким образом, чтобы достигалась цель
управления, т.е. выполнялось равенство
(1.1). Поскольку контроллер не получает
информацию о векторе
таким образом, чтобы достигалась цель
управления, т.е. выполнялось равенство
(1.1). Поскольку контроллер не получает
информацию о векторе
 ,
необходимую для проверки выполнения
данного равенства, то он должен располагать
математической моделью управляемого
объекта, устанавливающей взаимосвязь
между векторами входных воздействий
,
и вектором выходных сигналов
,
а также алгоритмом управления, позволяющим
определить вектор
на основании информации о векторах
и
.
,
необходимую для проверки выполнения
данного равенства, то он должен располагать
математической моделью управляемого
объекта, устанавливающей взаимосвязь
между векторами входных воздействий
,
и вектором выходных сигналов
,
а также алгоритмом управления, позволяющим
определить вектор
на основании информации о векторах
и
.
Системы управления по возмущению называются разомкнутыми, т.к. у них отсутствует передача информации с выхода системы на ее вход.
Достоинством
разомкнутых систем является высокое
быстродействие управления, поскольку
они реагируют непосредственно на причину
(изменение вектора
)
появления ошибки управления
 ,
а не на ее следствие (изменение вектора
).
Однако математическая модель управляемого
объекта и информация о векторе
должны быть достаточно достоверными,
чтобы с требуемой точностью обеспечить
выполнение равенства (1.1). На практике
такая достоверность обычно недостижима
ввиду допусков на изготовление деталей
объекта, изменчивости его параметров
(например, коэффициента теплопередачи
котла в результате зашлаковки поверхностей
нагрева) и наличия неконтролируемых
возмущений. Поэтому разомкнутые системы
управления применяются крайне редко.
,
а не на ее следствие (изменение вектора
).
Однако математическая модель управляемого
объекта и информация о векторе
должны быть достаточно достоверными,
чтобы с требуемой точностью обеспечить
выполнение равенства (1.1). На практике
такая достоверность обычно недостижима
ввиду допусков на изготовление деталей
объекта, изменчивости его параметров
(например, коэффициента теплопередачи
котла в результате зашлаковки поверхностей
нагрева) и наличия неконтролируемых
возмущений. Поэтому разомкнутые системы
управления применяются крайне редко.
Рассмотрим системы, реализующие принцип управления по отклонению.
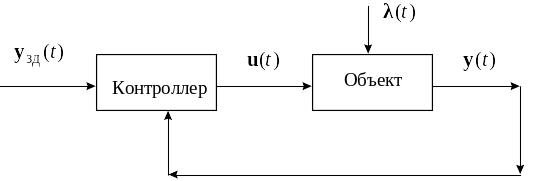
Рис. 1.2. Замкнутая система управления.
В этом случае в структуру системы управления вводится добавочный канал, по которому контроллер получает информацию о действительных значениях координат вектора в каждый момент времени; что позволяет контроллеру при появлении ошибки управления изменить управляющее воздействие таким образом, чтобы обеспечить выполнение требования
 ,
(1.3)
,
(1.3)
где
 -
некоторая скалярная функция от вектора
ошибки управления
,
называемая критерием
управления,
который численно характеризует степень
успешности достижения системой управления
поставленной перед ней цели.
-
некоторая скалярная функция от вектора
ошибки управления
,
называемая критерием
управления,
который численно характеризует степень
успешности достижения системой управления
поставленной перед ней цели.
Соответствующая функциональная схема системы управления приведена на рис. 1.2.; канал, по которому информация с выхода объекта подается на вход контроллера называется каналом обратной связи, или просто обратной связью.
В системах управления с обратной связью имеется замкнутый контур циркуляции сигналов, поэтому такие системы получили название замкнутых.
Замкнутые системы способны обеспечивать высокое качество управления при наличии неконтролируемых координат у вектора . Следовательно, обратная связь - это средство управления при неполной информации, придающее системе свойство адаптивности (приспосабливаемости) к изменениям условий ее работы.
Однако быстродействие замкнутых систем ниже, чем у разомкнутых, т.к. они реагируют лишь на следствие (изменение вектора ) воздействия на объект возмущений и принципиально не способны предотвратить появление ошибки управления . Поэтому для них цель управления формулируется в виде требования (1.3).
Командный блок непрерывно анализирует полученную информацию на основании принятого критерия качества управления . На основании такого анализа он может принять решение все оставить без изменений, если качество управления будет признано удовлетворительным, или модифицировать алгоритм управления, если оно окажется недопустимо низким.
Системы управления, способные изменять в процессе функционирования алгоритм управления, приспосабливаясь, таким образом, к изменяющимся условиям работы, получили название адаптивных.
В
тех случаях, когда некоторые из возмущающих
воздействий доступны непосредственному
контролю, целесообразно использовать
системы, в которых управление осуществляется
как по возмущению, так и по отклонению.
Такие системы называются комбинированными
(рис.
1.3). Согласно рис. 1.3 в комбинированной
системе контролируемое возмущение
поступает на вход так называемого
корректирующего устройства, вырабатывающего
сигнал
 ,
который затем со знаком минус добавляется
сумматором к сигналу задания
.
Следовательно, в комбинированной системе
ошибка управления определяется равенством
,
который затем со знаком минус добавляется
сумматором к сигналу задания
.
Следовательно, в комбинированной системе
ошибка управления определяется равенством
 .
(1.4)
.
(1.4)
Согласно выражению (1.4) комбинированная система быстрее реагирует на контролируемое возмущение , т.к. сигнал оказывает влияние на величину ошибки управления сразу при появлении этого возмущения, еще до того, как оно повлияет на управляемый объект.
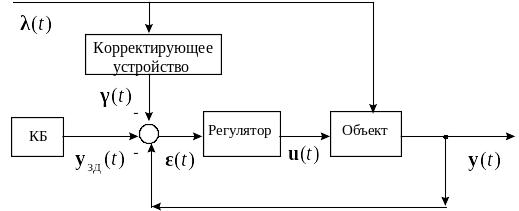
Рис. 1.3. Комбинированная система управления