

Назначение и схемы цап.
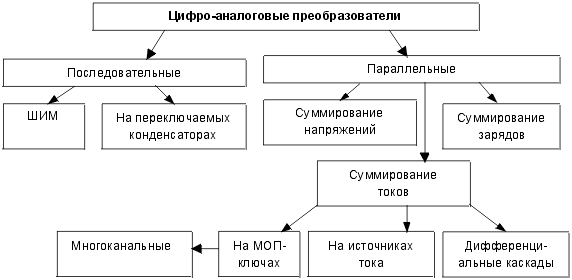
Цифро-аналоговый преобразователь (ЦАП) предназначен для преобразования числа, определенного, как правило, в виде двоичного кода, в напряжение или ток, пропорциональные значению цифрового кода. Схемотехника цифро-аналоговых преобразователей весьма разнообразна. На рис. 1 представлена классификационная схема ЦАП по схемотехническим признакам. Кроме этого, ИМС цифро-аналоговых преобразователей классифицируются по следующим признакам:По виду выходного сигнала: с токовым выходом и выходом в виде напряжения; По типу цифрового интерфейса: с последовательным вводом и с параллельным вводом входного кода ;По числу ЦАП на кристалле: одноканальные и многоканальные;По быстродействию: умеренного и высокого быстродействия.
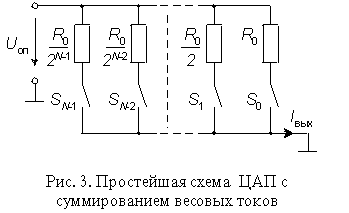
Большинство схем параллельных ЦАП основано на суммировании токов, сила каждого из которых пропорциональна весу цифрового двоичного разряда, причем должны суммироваться только токи разрядов, значения которых равны 1.
Простейшая схема, реализующая указанный принцип, приведена на рис. 3.
Сопротивления резисторов выбирают так, чтобы при замкнутых ключах через них протекал ток, соответствующий весу разряда. Ключ должен быть замкнут тогда, когда соответствующий ему бит входного слова равен единице.
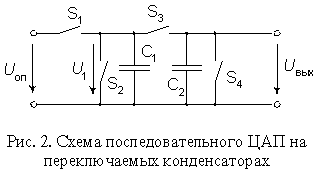
Последовательный ЦАП на переключаемых конденсаторах. Схема последовательного ЦАП, приведенная на рис. 2, позволяет выполнить цифро-аналоговое преобразование за значительно меньшее число тактов. В этой схеме емкости конденсаторов С1 и С2 равны. Перед началом цикла преобразования конденсатор С2 разряжается ключом S4. Входное двоичное слово задается в виде последовательного кода. Его преобразование осуществляется последовательно, начиная с младшего разряда d0. Каждый такт преобразования состоит из двух полутактов. В первом полутакте конденсатор С1 заряжается до опорного напряжения Uоп при d0=1 посредством замыкания ключа S1 или разряжается до нуля при d0=0 путем замыкания ключа S2. Во втором полутакте при разомкнутых ключах S1, S2 иS4 замыкается ключ S3, что вызывает деление заряда пополам между С1 и С2. Пока на конденсаторе С2 сохраняется заряд, процедура заряда конденсатора С1 должна быть повторена для следующего разряда d1 входного слова. Точно также выполняется преобразование для остальных разрядов слова.
Таким образом, представленная схема выполняет преобразование входного кода за 2N квантов, что значительно меньше, чем у ЦАП с ШИМ. Здесь требуется только два согласованных конденсатора небольшой емкости. Конфигурация аналоговой части схемы не зависит от разрядности преобразуемого кода. Однако по быстродействию последовательный ЦАП значительно уступает параллельным цифро-аналоговым преобразователям, что ограничивает область его применения.
Билет 5
Статические и астатические объекты управления.
Статическое и астатическое регулирование
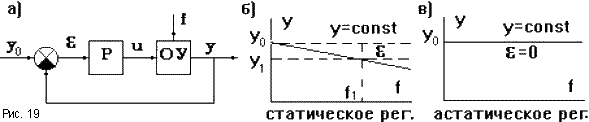
Если
на управляемый процесс действует
возмущение f,
то важное значение имеет статическая
характеристика САУ в форме y
= F(f)
при yo
= const.
Возможны два характерных вида этих
характеристик (рис.19). В соответствии с
тем, какая из двух характеристик
свойственна для данной
 САУ,
различают статическое
и астатическое регулирование.
САУ,
различают статическое
и астатическое регулирование.
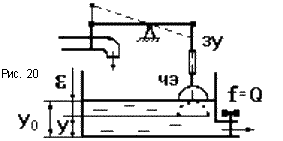
Рассмотрим
систему регулирования уровня воды в
баке (рис.20). Возмущающим фактора является
поток Q
воды из бака. Пусть при Q
= 0
имеем y
= yo
, e
= 0.
ЗУ системы настраивается так, чтобы
вода при этом не поступала. При Q![]() 0,
уровень воды понижается (e
0),
поплавок опускается и открывает заслонку,
в бак начинает поступать вода. Новое
состояние равновесия достигается при
равенстве входящего и выходящего потоков
воды. Но в любом случае при Q
0
заслонка должна быть обязательно
открыта, что возможно только при e
0.
Причем, чем больше Q, тем при больших
значениях e, устанавливается новое
равновесное состояние. Статическая
характеристика САУ имеет характерный
наклон (рис.19б). Это есть пример статического
регулирования.
Для получения статического регулирование,
все звенья САР должны быть статическими.
0,
уровень воды понижается (e
0),
поплавок опускается и открывает заслонку,
в бак начинает поступать вода. Новое
состояние равновесия достигается при
равенстве входящего и выходящего потоков
воды. Но в любом случае при Q
0
заслонка должна быть обязательно
открыта, что возможно только при e
0.
Причем, чем больше Q, тем при больших
значениях e, устанавливается новое
равновесное состояние. Статическая
характеристика САУ имеет характерный
наклон (рис.19б). Это есть пример статического
регулирования.
Для получения статического регулирование,
все звенья САР должны быть статическими.
Статические
регуляторы работают при обязательном
отклонении e
регулируемой величины от требуемого
значения. Это отклонение тем больше,
чем больше возмущение f.
Это заложено в принципе действия
регулятора и не является его погрешностью,
поэтому данное отклонение называется
статической
ошибкой регулятора.
Из рис.21 видно, что, чем больше коэффициент
передачи регулятора Kр,
тем на большую величину откроется
заслонка при одних и тех же значениях
e,
обеспечив в установившемся режиме
большую величину потока Q.
Это значит,
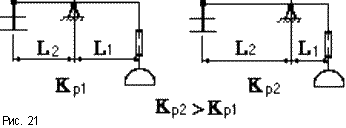
что на статической характеристике одинаковым значениям e при больших Kр будут соответствовать большие значения возмущения Q, статическая характеристика САУ пойдет более полого. Поэтому, чтобы уменьшить статическую ошибку надо увеличивать коэффициент передачи регулятора. Того же результата можно добиться, увеличивая коэффициент передачи объекта управления, но это дело конструкторов, проектирующих данный объект, а не специалистов по автоматике.
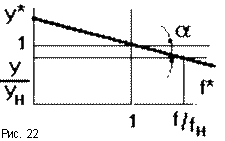
Статизм
d,
САР, характеризует насколько сильно
значение регулируемой величины
отклоняется от требуемого значения при
действии возмущений, и равна тангенсу
угла наклона статической характеристики,
построенной в относительных единицах:
d
= tg(a) =
![]()
(рис.22),
где y
= yн,
f = fн
-
точка номинального режима САУ. При
достаточно больших значениях Kp
имеем d
![]() 1/Kp.
1/Kp.
В некоторых случаях статическая ошибка недопустима, тогда переходят к астатическому регулированию, при котором регулируемая величина в установившемся режиме принимает точно требуемое значение независимо от величины возмущающего фактора. Статическая характеристика астатической САУ не имеет наклона (рис.19в). Возможные неточности относятся к погрешностям конкретной системы и не являются закономерными.
Для
того, чтобы получить астатическое
регулирование, необходимо в регулятор
включить астатическое звено, например
ИД, между ЧЭ и УО
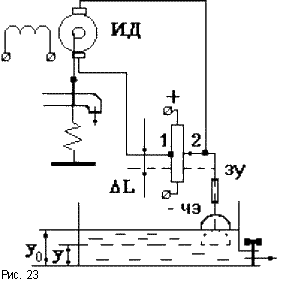 (рис.23).
(рис.23).
Если
уровень воды понизится, то поплавок
переместит движок потенциометра на
величину
L,
за счет этого появится разность
потенциалов
![]() 0
и ИД начнет поднимать заслонку до тех
пор, пока
не
уменьшится до нуля, а это возможно только
при
y = yo
. При поднятии уровня воды разность
потенциалов сменит знак, и двигатель
будет вращаться в противоположную
сторону, опуская заслонк.
0
и ИД начнет поднимать заслонку до тех
пор, пока
не
уменьшится до нуля, а это возможно только
при
y = yo
. При поднятии уровня воды разность
потенциалов сменит знак, и двигатель
будет вращаться в противоположную
сторону, опуская заслонк.
Достоинства и недостатки статического и астатического регулирования: статические регуляторы обладают статической ошибкой; астатические регуляторы статической ошибки не имеют, но они более инерционны, сложны конструктивно и более дороги.
Обеспечение требуемой статической точности регулирования является первой основной задачей при расчете элементов САУ.