

Емкостные измерительные преобразователи. Емкостные электромеханические преобразователи
Электротехническая промышленность изготавливает только индуктивные машины. Теория индуктивных машин доведена до высокого совершенства и почти весь объем данной книги посвящен машинам, в которых концентрация энергии происходит в магнитном поле.
В емкостных электромеханических преобразователях (ЭП) концентрация энергии и электромеханическое преобразование энергии происходят в электрическом поле. Хотя емкостные электрические машины появились значительно раньше индуктивных, до сих пор они как силовые ЭП, практически, не применяются.
Использование представления о магнитном заряде дает возможность симметрировать уравнения электромагнитного поля.
Теория емкостных машин, несмотря на усилия многих талантливых ученых, не получила глубокого развития. Поэтому целесообразно перенести достижения в области теории индуктивных машин на емкостные электрические машины.
Для индуктивных электрических машин ЭДС
 (5.1)
(5.1)
а для емкостных машин МДС
h = Dlυ, (5.2)
где D — индукция электрического поля или электрическое смещение; l - длина проводника в индуктивных машинах и ширина электрода в емкостных электрических машинах.
В индуктивных машинах электромеханическое преобразование энергии происходит за счет изменения индуктивностей, токов и напряжений, а в емкостных машинах — за счет изменения емкостей, напряжений и токов. Энергия электрического поля
 ,
(5.3)
,
(5.3)
где Е — напряженность электрического поля.
Чтобы создать емкостную электрическую машину, надо сконцентрировать энергию электрического поля. Если сконцентрировать энергию электрического поля в вакууме или воздухе, то степень концентрации энергии будет значительно ниже концентрации энергии магнитного поля и создать электрическую емкостную машину, способную конкурировать с индуктивной машиной, не удается.
Изменять емкость можно, изменяя площадь пластин конденсатора S, расстояние между пластинами х и диэлектрическую постоянную вещества е, находящегося между пластинами:
 .
(5.4)
.
(5.4)
Пренебрегая потерями, силу, возникающую при изменении емкости за счет изменения х, можно определить как
 ,
(5.5)
,
(5.5)
где Wи — энергия, доставляемая источником;
dWи=UdQ=U2dC, (5.6)
здесь Q— заряд на конденсаторе;
dQ=CdU.
Включая и отключая конденсатор от сети, можно обеспечить направление мощности из сети или отдавать ее в сеть.
Р

Рисунок 5.1. Трехфазное вращающееся электрическое поле
асполагая определенным образом пластины конденсатора в пространстве и сдвигая напряжение во времени, можно, как и для магнитного поля, получить вращающееся электрическое поле (рис. 5.1). Из трехфазной системы можно получить многофазные и двухфазные емкостные электрические машины.Емкостные ЭП, как и индуктивные, делятся на синхронные, асинхронные, коллекторные ЭП и трансформаторы.
В синхронной емкостной машине ωр = ωс. Для этого достаточно на электроды ротора подать постоянное напряжение (рис. 5.1). Чтобы получить асинхронную емкостную машину (ωр ≠ ωс), надо в синхронной машине заменить ротор, выполнив его в виде цилиндра из диэлектрика.
Емкостные
трансформаторы получаются, если
напряжение на конденсаторах изменяется.
Напряжение в емкостных машинах изменяется,
если при постоянном заряде Q
изменять емкость конденсатора
 .
.
Если к обкладкам конденсаторов А, В, С подводить напряжения от коммутатора (коллектора), можно получить коллекторные емкостные электрические машины.
Так же, как для индуктивных машин, можно ввести представление об обобщенной емкостной электрической машине, которая получается из обобщенной машины, если в ней индуктивности заменить на емкости. На основе теории дуально-инверсной электродинамики для обобщенной емкостной электрической машины записываются уравнения:
В
(5.7), (5.8) по отношению к уравнениям
индуктивной машины произведены следующие
дуально-инверсные замены: напряжение-ток,
 ;
индуктивности - полные емкости,
;
индуктивности - полные емкости, ;
взаимная индуктивность - взаимная
емкость,
;
взаимная индуктивность - взаимная
емкость,
 ,
активные сопротивления - проводимости,
,
активные сопротивления - проводимости,
 .
.
Полные емкости включают емкость и собственную емкость, например
 (5.9)
(5.9)
Уравнения емкостной машины могут быть записаны в различных системах координат и повторять все многообразие уравнений индуктивных электромеханических преобразователей.
При создании емкостных электрических машин было бы ошибкой копирование конструкций индуктивных машин. Индуктивные машины с вращательным движением ротора настолько совершенны, что заменить их чем-то другим невозможно. Надо пытаться найти конструкции емкостных машин, непохожие на индуктивные, и применить их там, где индуктивные машины не дают удачных решений, например для получения возвратно-поступательного движения, для ЭП с жидким и газообразным ротором и др.
ОБЛАСТЬ ПРИМЕНЕНИЯ
Конструктивные
схемы
емкостных преобразователей выполняются
различных вариантах в зависимости от
области применения
(Рис. 11)
При измерении уровней жидких и сыпучих
тел находят
применение
цилиндрические или плоские конденсаторы
(см.
Рис. 11,а), емкость
которых характеризуется уровнем х
и
зависит от диэлектрических проницаемостей
жидкости
 ,
изоляции
,
изоляции
 и воздуха
и воздуха
 .
.
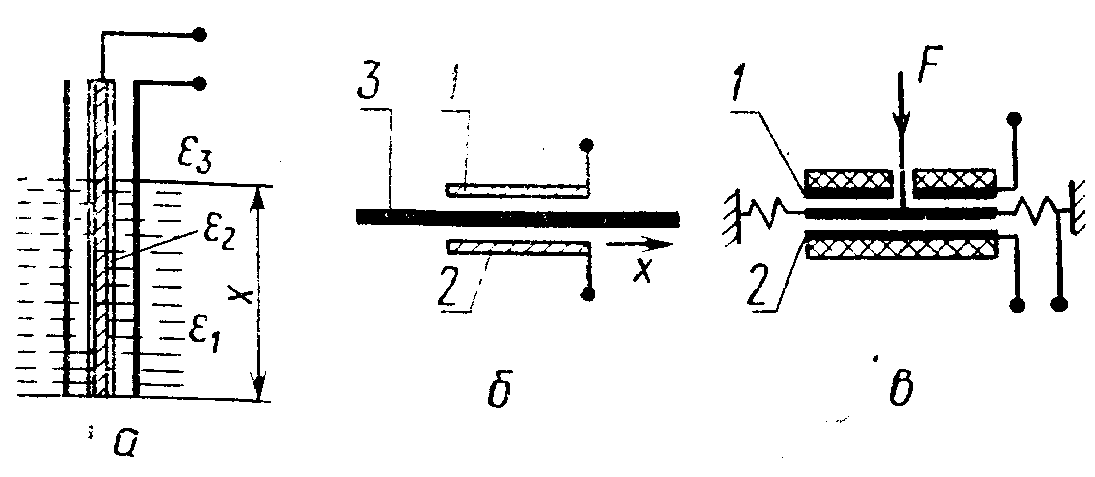
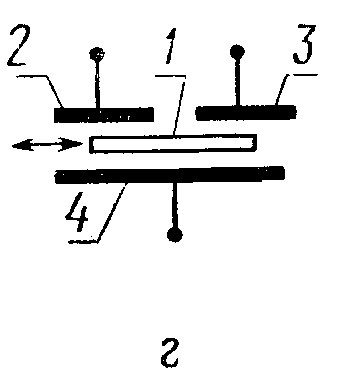

Рис. 11 Схемы устройства емкостных преобразователей
Для
измерения
толщины х
ленты
3 из диэлектрика с
 (см. Рис.
11, б)
ее протягивают между электродами 1 и 2,
расстояние межу которыми
(см. Рис.
11, б)
ее протягивают между электродами 1 и 2,
расстояние межу которыми
 .
Емкость конденсатора будет C=s/[(
-x)/
.
Емкость конденсатора будет C=s/[(
-x)/ +x/
,
где
-диэлектрическая
проницаемость воздуха.
+x/
,
где
-диэлектрическая
проницаемость воздуха.
Для измерения малых перемещений (до единиц микрометров), а также точного измерения быстроменяющихся сил и давлений применяются дифференциальные емкостные преобразователи с переменным зазором (Рис. 11,в). Средний электрод конденсатора укреплен на упругом элементе (мембране, упругой пластинке, растяжках) между неподвижными электродами 1 и 2.
Рассматриваемая схема может быть использована в приборах уравновешивания. Для этого усиленный сигнал с конденсатора после фазочувствительного детектирования может быть подан на обкладки 1 и 2, вследствие чего на средний электрод будет действовать электростатическая сила, уравновешивающая измеряемую силу. На Рис. 11, г и д показаны схемы устройства емкостных преобразователей с переменной площадью. В схеме на Рис. 11, г диэлектрик 1 перемещается по стрелке, а в схеме на Рис. 11, д один из электродов 2 жестко связан с валом и совершает угловые перемещения относительно неподвижного электрода 1.
Возможные области применения датчиков (в том числе и емкостных) чрезвычайно разнообразны, можно выделить лишь отдельные сферы:
промышленная техника измерения и регулирования,
робототехника,
автомобилестроение,
бытовая техника,
медицинская техника.
Применимость того или иного датчика в этих сферах определяется прежде всего отношением цена/эффективность. При промышленном применении определяющим фактором является погрешность, которая при регулировании процессов должна составлять 1...2%, а для задач контроля - 2...3%. В этих случаях цены датчиков превышают 100 немецких марок ФРГ. Для специальных применений в области робототехники и медицинской техники цены датчиков могут достигать даже уровня 10...100 тыс. немецких марок ФРГ. Благодаря внедрению новых технологий изготовления (высоковакуумное напыление, распыление, химическое осаждение из газовой фазы, фотолитография и т. д.) и новых материалов непрерывно расширяются сферы применения датчиков, недоступные ранее из-за их высокой цены.