

Билет № 1
1. Критерий устойчивости Найквиста
Этот критерий отличается от критерия Михайлова тем, что об устойчивости замкнутой системы судят по виду амплитудно-фазовой характеристике разомкнутой системы, которую можно получить как аналитически, так и экспериментально. Это обстоятельство выгодно отличает рассматриваемый критерий устойчивости от ранее изложенных.
Пусть
передаточная функция разомкнутой
линейной САУ
 , тогда
, тогда
 .
Введём вспомогательную функцию
.
Введём вспомогательную функцию
 .
.
Числитель этой функции представляет собой левую часть характеристического уравнения замкнутой системы, а знаменатель – левую часть характеристического уравнения разомкнутой системы.
Рассмотрим
годограф вспомогательной функции
 при изменении ω
в пределах
при изменении ω
в пределах
 :
:
 ,
,
где
 - аргумент (фаза) функции
- аргумент (фаза) функции
 (замкнутая система),
(замкнутая система),
 - аргумент (фаза) функции
- аргумент (фаза) функции
 (разомкнутая система). Требование
устойчивости САУ в замкнутом состоянии
выразится в равенстве
(разомкнутая система). Требование
устойчивости САУ в замкнутом состоянии
выразится в равенстве
 (критерий Михайлова (11)), но
(критерий Михайлова (11)), но
 .(12)
.(12)
Пусть система в разомкнутом состоянии неустойчива и имеет l корней в правой полуплоскости (8), с учётом изменения ω от 0 до ∞
 ,
,
и, следовательно, из (11) и (12) имеем
 .(13)
.(13)
Так
как вспомогательная функция
отличается от частотной характеристики
 разомкнутой системы на +1, то условие
устойчивости (13) можно непосредственно
перенести на
.
разомкнутой системы на +1, то условие
устойчивости (13) можно непосредственно
перенести на
.
Теорема (критерий Найквиста). Для устойчивости САУ необходимо и достаточно, чтобы годограф разомкнутой системы при изменении ω от 0 до ∞ охватывал l/2 раз в положительном направлении точку (-1, i0), где l – число корней характеристического уравнения разомкнутой системы, лежащих в правой полуплоскости.
Из этой теоремы непосредственно вытекает
Следствие. Если разомкнутая система устойчива (l=0), то для устойчивости замкнутой системы необходимо и достаточно, чтобы частотный годограф при изменении ω от 0 до ∞ не охватывал точку (-1, i0).
Заметим, что для применении частотного критерия устойчивости Найквиста необходимо знать, устойчива или неустойчива система в разомкнутом состоянии. При этом, если система в разомкнутом состоянии неустойчива, то следует определить количество корней её характеристического уравнения, имеющих положительные вещественные части. Только в этом случае можно применить частотный критерий устойчивости Найквиста к исследованию устойчивости замкнутой системы.
Пример.
На рисунке 3 изображён годограф частотной
характеристики для разомкнутого
колебательного звена. Как видно из
рисунка 3, этот годограф не охватывает
точку (-1, i0),
и так как разомкнутое колебательное
звено устойчиво ( ),
то устойчивым
будет
и замкнутое колебательное звено.
),
то устойчивым
будет
и замкнутое колебательное звено.
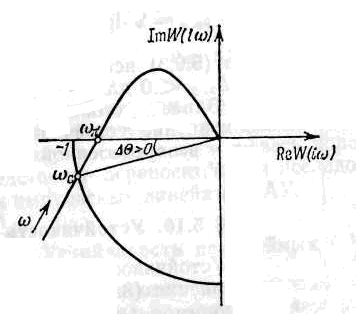
Рисунок 3
Примеры годографов Найквиста статических САР ([0...+))
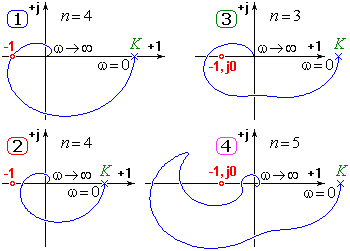
САР на колебательной границе устойчивости.
Абсолютно устойчивая САР (устойчива при любом уменьшении K).
Неустойчивая САР.
Условно устойчивая САР (только при изменении K в некотором диапазоне).
2 – Цели и задачи автоматизации технологических процессов и производств. Иерархическая структура АСУ и её характеристики.
Задача автоматиз. тп заключается в осущ. управления контроля и управл. различ. техн6олог. процессами. ТП-ом называется последовательная смена во времени состояния комплекса произв. оборуд-я, мат. и энерг. потоков, способов обработки, направл. на изготовление новой продукции. ТП можно разделить на след. виды, различ. физ. природой, аппарат. управл., способом управл. и т.д.
1) проц. переработки материалов, происходит в соотв.с законами мат. и энерг. балансов. Конечная цель - выработка готовой продукции.
2) проц. транспортировки - проц. движения контейнеров, подьемников, насосов и др. техн. средств перемещения в просстранстве сырье, готовую продукцию, жидкости и газы.
3) энергетические процессы - процессы выработки, преобразования и передачи различных видов энергии. Конечная цель - уменьшение энергетических затрат на процессы переработки и транспортировки.
4) процессыы сбора обрабтки и передачи информации рыночной экономики. Конечная цель - повышение эффективности производства.
Цели автоматизации
Рост прибыли, рентабельности производства, повышение эффективности труда
Улучшение качества выпускаемой продукции
Применение энергосберегающих технологий и экологически безопасных условий труда
Создание условий для оптимального управления всеми ресурсами предприятия
Задачи автоматизации
Внедрение прогрессивных технологических схем производства
Интенсификация производства на основе внедрения новейших достижений науки и техники
Дальнейшее повышение уровня механизации и автоматизации
Направление развития автоматизации
Разработка и внедрение специальных приборов и ТСА для анализа качества и сертификации сырья, полуфабрикатов и готовой продукции (стандарт ISO 9000 – регламент производства качества продукции).
Разработка и внедрение систем автоматического управления (САУ) и автоматизированных систем управления ТП и П (АСУ).
Внедрение комплексных методов автоматизации путем разработки интегрирующих систем управления ИАСУ предприятия (интеграция ERP, MRP-концепции со SCADA-системами).
![]() Технологический
процесс – последовательная смена во
времени состояния комплекса
производственного оборудования,
материальных и энергетических потоков,
способов образования сырья, полуфабрикатов,
направленная на изготовление новых
видов продукции.
Технологический
процесс – последовательная смена во
времени состояния комплекса
производственного оборудования,
материальных и энергетических потоков,
способов образования сырья, полуфабрикатов,
направленная на изготовление новых
видов продукции.
Для оптимального протекания технологического процесса им надо управлять, т.е. осуществлять воздействия по соответствующему алгоритму управления системы. Под алгоритмом управления понимается совокупность предписаний, определяющих характер воздействия из вне на управляемый объект с целью осуществления им заданного алгоритма функционирования.
Под алгоритмом функционирования понимается совокупность предписаний ведущих к правильному выполнению технологического процесса в управляемом объекте. Системой называется совокупность происходящих физико-химических процессов и средств их реализации. Система – это собственно технологический процесс, агрегат, машина, аппарат, установка или отдельные производства, в которых он протекает, все средства контроля управления процессом и связи между ними.
В любой промышленной автоматизированной системе можно всегда выделить две взаимодействующие между собой части: технологический объект управления (ТОУ) и управляющее устройство (УУ).
ТОУ + УУ = СУ
ТОУ (технологический объект управления) – это совокупность технологического оборудования и реализованного на нем по соответствующим инструкциям и регламентам технологического процесса. Под ТОУ в зависимости от степени декомпозиции понимается: агрегат, установка (реализующая самостоятельный технологический процесс), группа установок, линия, отдельное производство (цехи, участки) или производственный процесс всего технологического предприятия, если управление этим процессом носит в основном технологический характер, т.е. заключается в реализации рациональных режимов работы. Совокупность, совместно функционирующих ТОУ и АСУТП, образует автоматизированный технологический комплекс АТК: ТОУ+АСУТП=>АТК
В том случае, когда все функции в системе управления по обработке информации о целях и результатах управления, выработке управляющих воздействий и их передаче на объект управления выполняются без участия человека, система называется автоматической (САУ – система автоматического управления).
Классификация систем управления по иерархическому признаку.
1. Одноуровневые системы, к которым относится управление отдельными агрегатами на базе локальных систем контроля регулирования и управления.
2. Многоуровневые системы управления, которые строятся в виде многоступенчатой структуры, последовательно осуществляющей функции контроля и управления производственным комплексом.
Например, на нижнем, первом уровне могут использоваться локальные приборы контроля регулирования и управления, на следующем, втором уровне – вычислительные комплексы, и на третьем, верхнем – двухмашинные комплексы.
Установка нескольких ВК в системе, управляющей единым технологическим процессом, требует координации их работы, осуществление которой возможно с помощью двухуровневых систем, где на нижнем уровне решаются задачи контроля и управления отдельными агрегатами, а на верхнем – задачи координации работы агрегатов, составления отчетно-учетной документации.
К многоуровневым системам безусловно можно отнести и интегрированные АСУ ТП – АСУ, согласованно управляющие различными взаимосвязанными процессами.
Частным видом интегрированной АСУ на предприятии является огранизационно-технологическая АСУ (АСУ ОТ), согласованно управляющая взаимосвязанными организационными и технологическими процессами.
При этом необходимо решать вопросы о совместимости двух или более АСУ

Рассмотрим структуру системы автоматического регулирования с обратной связью (рис. 1.15). Регулятор Р на базе информации об ошибке e(t), т.е. отклонении управляемой переменной y(t) от задания y*(t), формирует по некоторому алгоритму управляющее воздействие u(t) на объект ОУ.
Используют различные алгоритмы, или, как еще говорят, законы регулирования. Приведем некоторые из них, полагая, что все переменные являются функциями непрерывного времени.
Пропорциональный закон (П-закон) регулирования имеет ясную логику — чем больше ошибка, тем сильнее воздействие на объект. Если регулятор трактовать как преобразователь сигналов, то математически алгоритм выражается так:
![]()
Интегральный закон (И-закон) регулирования означает, что уровень воздействия на объект определяется суммарной ошибкой, накопившейся за определенное время:
![]()
Если продифференцировать последнее выражение по времени, получим
т.е. ошибка системы определяет скорость изменения управляющего воздействия.
Характерной чертой И-закона является то, что управляющее воздействие изменяется до тех пор, пока ошибка не станет равной нулю.
Пропорционально-интегральный закон (ПИ-закон) является комбинацией двух предыдущих:
![]()
П![]() ропорционально-интегрально-дифференциальный
закон (ПИД-закон)
формирует управляющие воздействия с
учетом и скорости изменения
ошибки:
ропорционально-интегрально-дифференциальный
закон (ПИД-закон)
формирует управляющие воздействия с
учетом и скорости изменения
ошибки:
Этот закон наиболее часто реализуется в системах промышленной автоматики.
1.5.3. Классификация систем управления по энергетическому признаку
Хотя переменные — входы и выходы элементов систем управления — в теории управления рассматриваются как носители информации, не следует забывать, что исполнение принятого в управляющем устройстве решения об оказании управляющего воздействия на объект связано с энергетическими затратами, иногда значительными.
Для оказания управляющего воздействия может использоваться энергия самого управляемого процесса, отбираемая через измерительный элемент. В этом случае говорят о прямом регулировании. Широко распространены поплавковые регуляторы уровня прямого действия, например, для карбюраторов автомобильных двигателей (рис. 1.16). Здесь поплавок одновременно осуществляет три операции: измерение уровня, принятие решения об оказании управляющего воздействия и исполнение решения. Аналогичный принцип регулирования уровня воды в котле паровой машины реализовал русский механик И. И. Ползунов.
А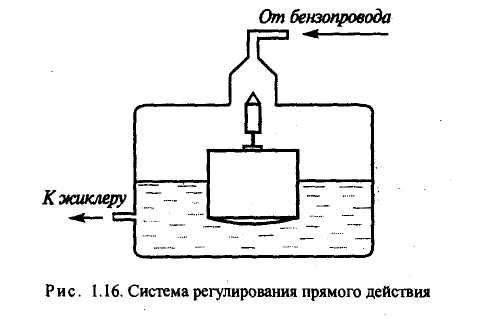 нглийский
механик Дж. Уатг (J.
Watt)
построил прямую систему автоматического
регулирования частоты вращения вала
паровой машины
с центробежным датчиком. Следует
заметить, что все приведенные примеры
систем прямого регулирования реализуют
принцип управления по замкнутому
циклу.
нглийский
механик Дж. Уатг (J.
Watt)
построил прямую систему автоматического
регулирования частоты вращения вала
паровой машины
с центробежным датчиком. Следует
заметить, что все приведенные примеры
систем прямого регулирования реализуют
принцип управления по замкнутому
циклу.
Достоинством систем прямого регулирования является простота и надежность. Они, как правило, органично вписываются в конструкцию управляемых объектов, не требуя посторонних источников энергии. Недостатком этих систем является невысокая точность при необходимости обеспечивать большие усилия для перемещения управляющих органов. Например, при стабилизации уровня жидкости в большом резервуаре с помощью регулятора прямого действия пришлось бы сильно увеличивать объем поплавка. Для точного регулирования частоты вращения паровой машины большой мощности, пар в которую подается через регулирующий клапан с большим усилием перестановки штока, необходимо увеличивать вращающиеся массы центробежного датчика, что приводит к ухудшению качества переходных процессов.
Для повышения точности управления объектами, требующими значительных энергетических затрат на управление, необходимо разделение функций между измерительным и исполнительным элементами систем управления. В системах непрямого действия для оказания управляющего воздействия на объект привлекается дополнительный источник энергии. На рис. 1.17 изображена принципиальная схема такой системы для стабилизации уровня жидкости. Измеритель уровня — поплавок — имеет небольшие размеры, так как перемещение подвижного контакта потенциометра П не требует больших усилий. Напряжение Дм, пропорциональное отклонению уровня от заданного, усиливается в усилителе У и приводит во вращение двигатель Д. Двигатель через редуктор Р перемещает клапан на трубопроводе притока жидкости. Как усилитель, так и обмотка возбуждения двигателя потребляют электроэнергию дополнительного источника.
 Достоинством
систем непрямого управления является
более высокая
точность. Недостатком — большая сложность
и стоимость, необходимость
дополнительных источников энергии,
меньшая надежность.По
виду используемой для управления энергии
различают электрические,
механические, гидравлические,
пневматические, электрогидравлические
и другие системы автоматического
управления.
Достоинством
систем непрямого управления является
более высокая
точность. Недостатком — большая сложность
и стоимость, необходимость
дополнительных источников энергии,
меньшая надежность.По
виду используемой для управления энергии
различают электрические,
механические, гидравлические,
пневматические, электрогидравлические
и другие системы автоматического
управления.