

6. Математическое описание сау. Дифференциальные уравнения.
Дифференциальная и операторная формы линейных ДУ.
![]()
![]()
Запись дифференциальных уравнений в операторной форме позволяет свести задачу к решению системы алгебраических уравнений. К x(t) и g(t) можно применить преобразование Лапласа.
![]()
![]()
В результате применения преобразования Лапласа можем перейти от дифференциального уравнения к алгебраическому уравнению.
![]()
После преобразования имеем следующую схему:
![]()
![]()
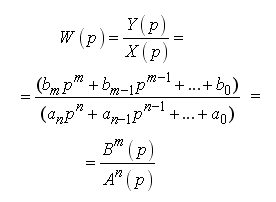
Уравнение САУ позволяет по x(t) найти g(t) и наоборот
![]() – полином
входа
– полином
входа
![]() – полином
выхода
– полином
выхода
Чем сложнее полином, тем сложнее система
![]()
W(p) – передаточная функция
7Математическое описание. Преобразование Лапласа. Передаточная функция.
Анализ и синтез САУ существенно упрощается при использовании прикладных математических методов операционного исчисления.
Имеется функция вещественной переменной f(t), ей можно поставить в соответствие F(p), где f(t) – оригинал, F(p) – изображение.
![]() -интеграл
Лапласа
-интеграл
Лапласа
![]()
![]()
![]() –
комплексная
переменная;
–
комплексная
переменная;
Преобразование Лапласа обладает следующими свойствами: операциям дифференцирования и интегрирования в приведении вещественной переменной соответствуют эквивалентные алгебраические операции умножения и деления с использованием комплексной переменной.
Применение преобразования Лапласа позволяет перейти от исходных дифференциальных уравнений к эквивалентным алгебраическим уравнениям в представительстве комплексной переменной.
Передаточной функция звена или системы – отношение изображения выходной величины к изображению входной величины при нулевых начальных условиях.
![]()
 –
передаточная
функция.
–
передаточная
функция.
8 Математическое описание. Частотные характеристики.(афчх, лах и лфх)
Если
на вход звена (системы) подать гармоническое
воздействие
![]() ,
то после окончания переходных процессов
на выходе устанавливаются колебания
,
то после окончания переходных процессов
на выходе устанавливаются колебания
![]() той
же частоты, но иной амплитуды и сдвинутые
по фазе относительно входных колебаний.
той
же частоты, но иной амплитуды и сдвинутые
по фазе относительно входных колебаний.
![]() – амплитудно-фазовая
характеристика есть отношение выходной
величины к входной величине выраженной
в комплексной форме.
– амплитудно-фазовая
характеристика есть отношение выходной
величины к входной величине выраженной
в комплексной форме.
![]() – АЧХ
– АЧХ
![]() –
функция
частоты – ФЧХ
–
функция
частоты – ФЧХ
АФХ может быть получена из выражения передаточной функции W(p) заменой комплексной переменной р на мнимую переменную jw:

АФХ строится на комплексной плоскости в координатах вещественная составляющая по оси х; мнимая составляющая по оси у, при изменении частоты от 0 до ∞.
10 Математическое описание. Временные характеристики.
Временная характеристика звена системы – закон изменения выходной величины в функции времени при изменении входной величины по определенному закону и при условии, что до приложения внешнего воздействия звено находилось в покое. Зависит от характера звена.
Ступенчатое воздействие при t=0,входная величина X
![]()

Линейное воздействие с постоянной скоростью

Переходная функция звена – реакция звена на единичное ступенчатое воздействие.
Y(p)=W(p)*X(p); H(p)=>W(p)/p; L{1(t)}=1/p; h(t)=L-1[W(p)/p]
Импульсная переходная или весовая функция – реакция звена на импульсное воздействие в виде δU
Y(p)=W(p)*X(p); L[δ(t)]=1; K(p)=W(p)*1; k(t)=L-1[W(p)]; W(p)=pH(p)=k(p); k(t)=dh/dt
Достоинством временных характеристик является то, что они могут быть получены экспериментально.
11 Элементарные типовые звенья. Интегрирующее звено.
Так называют звено с передаточной функцией W(s) = к/s. Его частотные и временные функции имеют следующий вид:
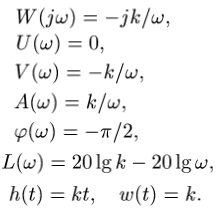
АФЧХ:

ЛАХ, ЛФХ:

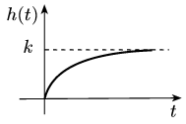
Переходная характеристика:

k-коэфф усиления
12 Элементарные типовые звенья. Апериодическое звено.
Так называют звено с передаточной функцией W(s) = k/(Ts + 1). Его частотные и временные функции имеют следующий вид:

![]()
АФЧХ:

ЛАХ, ЛФХ:

Переходная характеристика:
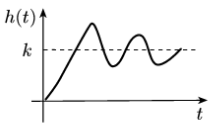
13 Элементарные типовые звенья. Колебательное звено.
Так называют звено с передаточной функцией:
![]()
АФЧХ:

ЛАХ,ЛФХ:
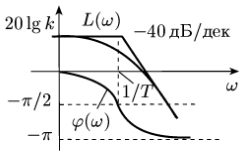
Переходная характеристика:
15 Элементарные типовые звенья. Дифференцирующее звено I-го порядка.
Передаточная функция:
W(p)=k(Tp+1)
16 Элементарные типовые звенья. Дифференцирующее звено II-го порядка.
Передаточная функция:
W(p)=k(T2p2+2ETp+1)
14 Элементарные типовые звенья. Идеальное дифференцирующее звено.
Дифференцирующее звено. Так называют звено с передаточной функцией W(s) = ks. Его частотные и временные функции имеют следующий вид:
АФЧХ:

ЛАХ, ЛФХ:

17 Преобразование структурных схем САУ. Связь структурных схем с графами.
Л
 юбую
САУ можно рассматривать как комбинацию
динамических звеньев. Изображение САУ
в виде совокупности динамических звеньев
с указателями связей между ними назыв.
структурной схемой. 1)
звено с 1 входом и выходом
для него Y(p)=W(p)
*X(p)
2)
звено с 2-мя входами
юбую
САУ можно рассматривать как комбинацию
динамических звеньев. Изображение САУ
в виде совокупности динамических звеньев
с указателями связей между ними назыв.
структурной схемой. 1)
звено с 1 входом и выходом
для него Y(p)=W(p)
*X(p)
2)
звено с 2-мя входами
д ля
него Y(p)=W1(p)*X1(p)+
W(p)*X2(p).
Его можно представить и в другом виде:
ля
него Y(p)=W1(p)*X1(p)+
W(p)*X2(p).
Его можно представить и в другом виде:

3) Узел х1=х2=х3

4) Сумматор y=x1±x2


или или
П

 равило
преобраз. структурных схем:
1)
перестановка однотипных элементов: а)
узлы с узлами, б) сумматоры с сумматорами,
в) звенья со звеньями:
равило
преобраз. структурных схем:
1)
перестановка однотипных элементов: а)
узлы с узлами, б) сумматоры с сумматорами,
в) звенья со звеньями:



=
 2)
Перенос узла череззвено: а) с выхода на
вход б) со входа
2)
Перенос узла череззвено: а) с выхода на
вход б) со входа
на выход =


=
3
W1
Х1
Х3



 )
Перенос сумматора через звено: а) со
входа на выход б) с выхода на вход
=
)
Перенос сумматора через звено: а) со
входа на выход б) с выхода на вход
=
Х2




С
W(р)
х
у



П ример:
ример:
