

7.2. Характеристики растровых моделей
1. Разрешение
Разрешение – размер наименьшего из различимых участков пространства (поверхности), отображаемый одной ячейкой. Более высоким разрешением обладает растр с меньшим размером ячеек. Высокое разрешение подразумевает обилие деталей, множество ячеек, минимальный размер ячеек. Чем больше размер ячейки, тем большую площадь она покрывает, тем меньшее разрешение растра. Для разных задач используются разные размеры ячеек, растры разного разрешения.
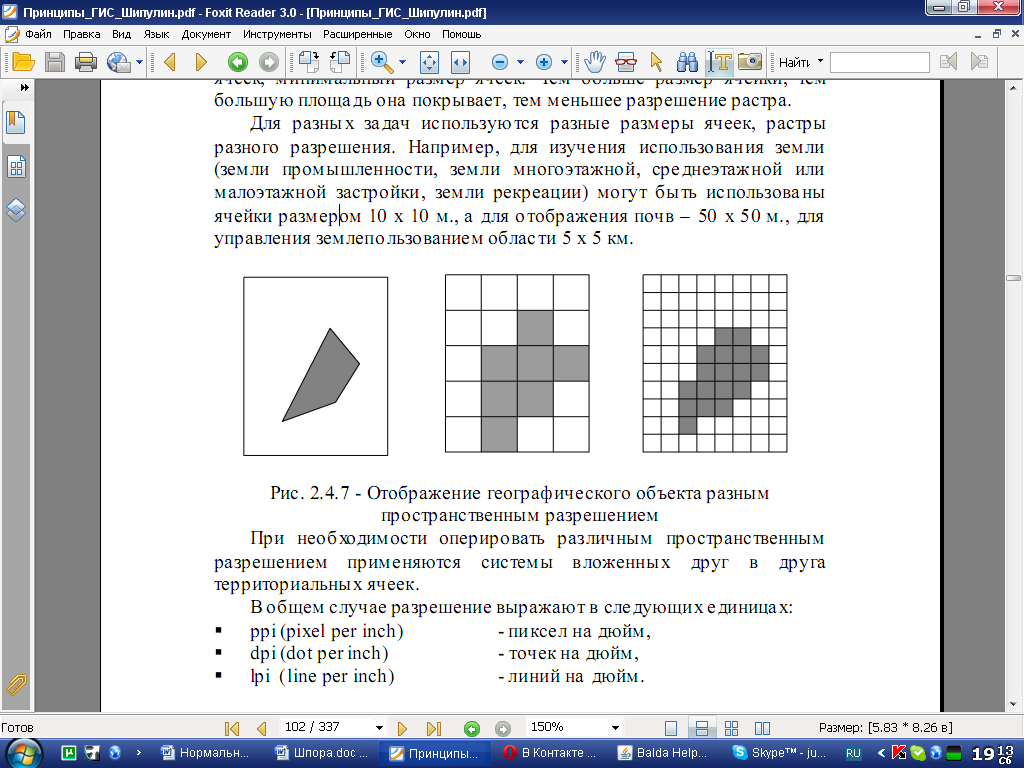
При необходимости оперировать различным пространственным разрешением применяются системы вложенных друг в друга территориальных ячеек.
В общем случае разрешение выражают в следующих единицах:
ppi (pixel per inch) - пиксел на дюйм,
dpi (dot per inch) - точек на дюйм,
lpi (line per inch) - линий на дюйм.
2. Геометрия растров
Форма, размер, количество ячеек растра:
Растр имеет прямоугольную форму. Каждая ячейка имеет прямоугольную форму и размеры: ширину dx и высоту dy.
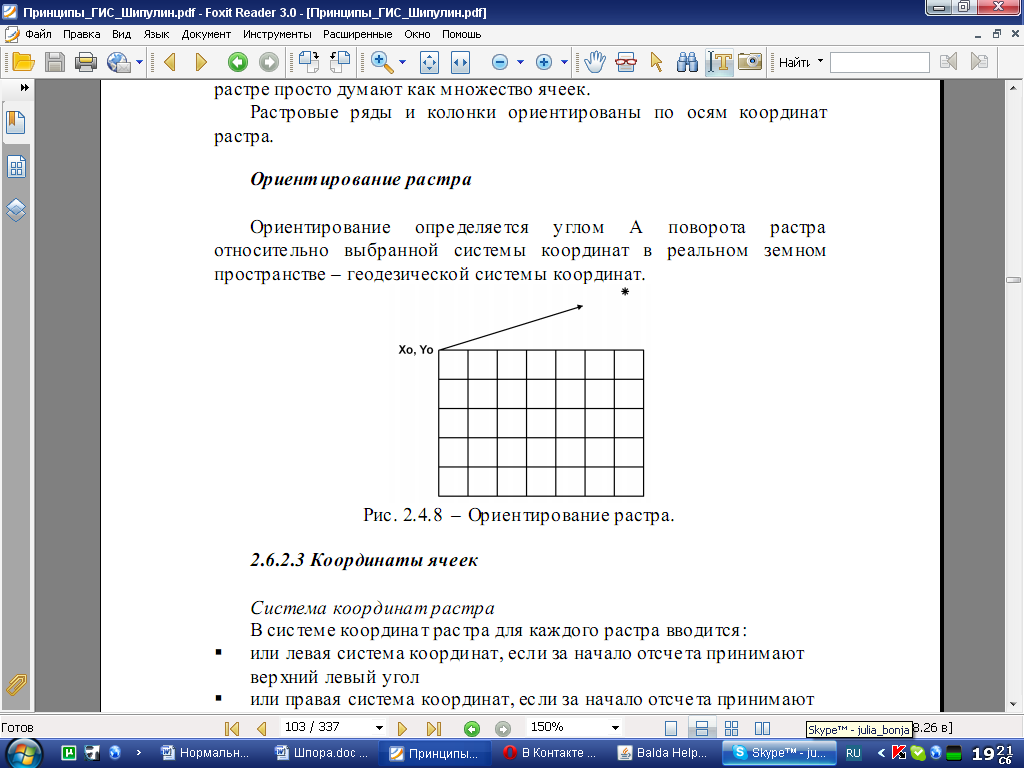
Растр имеет прямоугольную форму, каждая ячейка имеет прямоугольную форму и размер, растр образован ячейками из n рядов и m колонок, общее количество ячеек растра = mn, растр имеет nm центральных точек и (n+1)(m+1) точек углов. Это различие между количеством центральных точек и количеством углов часто игнорируется, и о растре просто думают как множество ячеек. Растровые ряды и колонки ориентированы по осям координат растра. Ориентирование определяется углом A поворота растра относительно выбранной системы координат в реальном земном пространстве – геодезической системы координат.
3. Координаты ячеек
Система координат растра
В системе координат растра для каждого растра вводится:
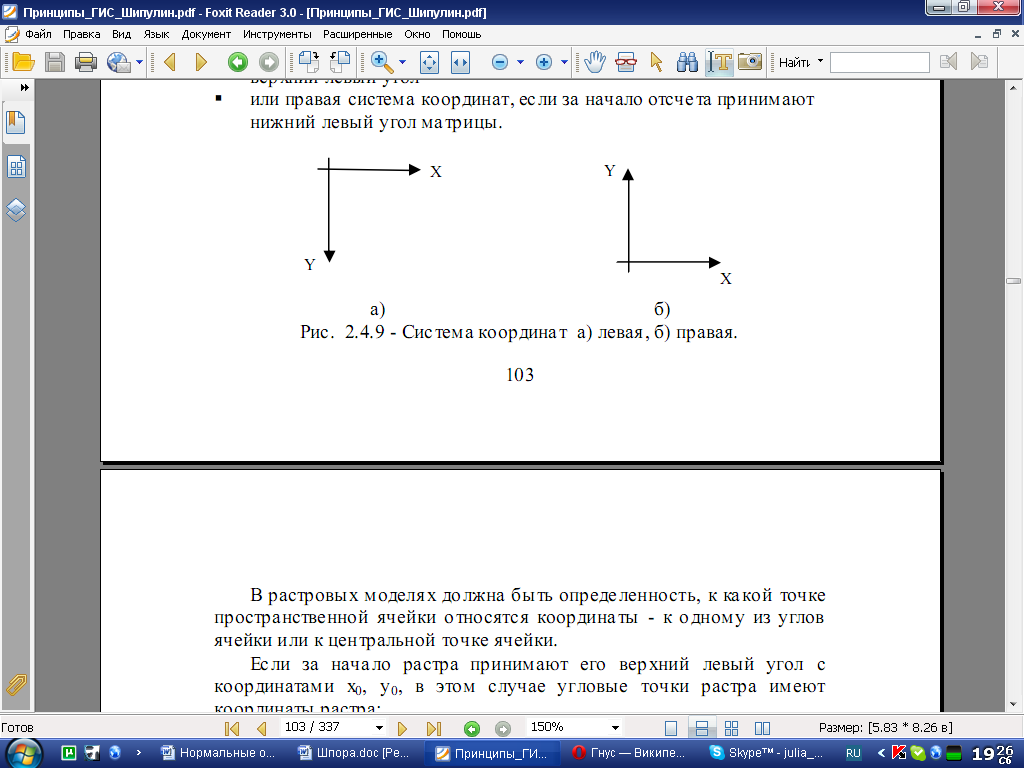
или левая система координат, если за начало отсчета принимают верхний левый угол
или правая система координат, если за начало отсчета принимают нижний левый угол матрицы.
В растровых моделях должна быть определенность, к какой точке пространственной ячейки относятся координаты - к одному из углов ячейки или к центральной точке ячейки. Если за начало растра принимают его верхний левый угол с координатами x0, y0, в этом случае угловые точки растра имеют координаты растра:
нижняя левая точка:
x0, y0 + n*dy ;
верхняя правая точка:
x0 + m*dx , y0 ;
нижняя правая точка:
x0 + m*dx , y0 + n*dy .
Верхний левый угол ячейки в колонке i и ряду j, имеет координаты растра:
xi = x0 + (i -1)*dx (2.4.1)
yj = y0 + (j -1)*dy (2.4.2)
Центральная точка ячейки в колонке i и ряду j имеет координаты растра:
xi = x0 + (i – 0,5)*dx (2.4.3)
yj = y0 + (j – 0,5)*dy (2.4.4)
Геодезическая система координат
Для определения координат ячеек в геодезической системе координат должны быть получены геодезические координаты верхнего левого угла растра Xo, Yo. При угле ориентирования А растра геодезические координаты верхнего левого угла ячейки в ряду i и колонке j вычисляются по формулам преобразования координат:
Xi = Xo + xi * Cos A – yj * Sin A (2.4.5)
Yj = Yo + xi * Sin A + yj * Cos A (2.4.6)