

3.2. Понятие «граф»
Граф - есть множество элементов, связанных между собой отношениями. Геометрически граф представляется в форме векторной схемы, состоящей из вершин, узлов, ребер, дуг.
Вершина (англ. Vertex) – э то объект графа. Вершины представляют точками.
Ребро (англ. Edge) – э то линия, которая связывает точки (объекты графа). Ребра представляют отношения между объектами.
Дуга (англ. Arc) – это ребро с определенной ориентацией относительно ее конечных вершин.
Узел (англ. Node) – это вершина, общая для двух и большего числа дуг. В узлах сходятся дуги.
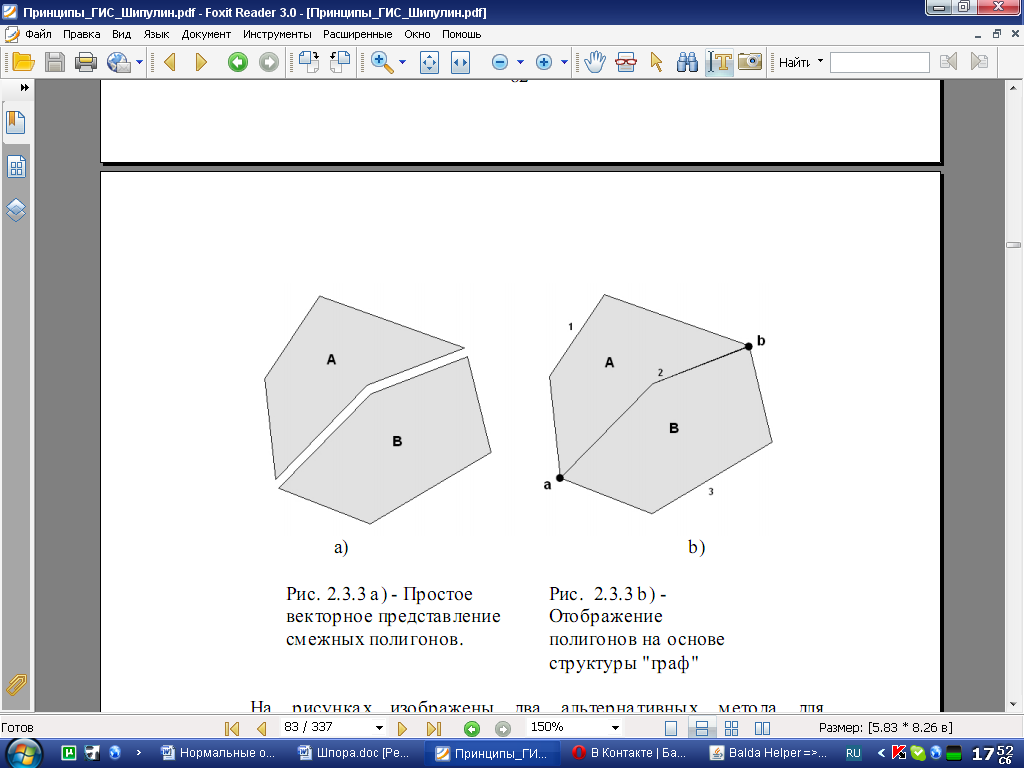
На рисунках изображены два альтернативных метода для представления полигонов.
Первый метод (рис. 2.3.3 а) описывает полигон как замкнутую последовательность векторов, представленную списком координат.
Второй метод (рис. 2.3.3 b) описывает полигон как набор дуг (1,2,3) и узлов (a,b). Полигон А определяют дуги 1,2. Полигон В определяют дуги 2,3.
В первом случае координаты точек смежных линий повторяются.
Во втором случае общую границу смежных полигонов представляет дуга 2, координаты которой используются один раз при описании дуги.
3.3. Понятие «топология»
Топология – это раздел математики, изучающий идею непрерывности.
Непрерывность – это одно из фундаментальных свойств категории пространства-времени. Топология изучает пространственные отношения, которые не изменяются при любых непрерывных преобразованиях пространства. Топология реализуется математической процедурой явного определения пространственных отношений.
В ГИС топология реализуется на основе оригинальной и простой идеи: различные типы пространственных отношений представляются связанными списками объектов. В ГИС реализованы три базовых топологических отношения дуг (Arc):
1. Дуги, которые соединяются в полигон, окружают область;
2. Дуги, имеющие направление, имеют правые и левые стороны.
3. Дуги соединяются в узлах;
На этой основе в ГИС [28] формализована топологическая группа
пространственных отношений, которые не изменяются при любых
непрерывных преобразованиях пространства:
1. Область (Area) – определяется дугами, которые соединяются в полигон для окружения области.
2. Смежность (Contiguity) – определяется дугами, имеющими направление, и поэтому имеют правую и левую стороны.
3. Связность (Connectivity) – определяется дугами, которые соединяются в узлах.
Создание и хранение моделей географических объектов на основе пространственных отношений имеет ряд преимуществ:
Данные хранятся более эффективно,
Данные можно обрабатывать быстрее и большими наборами,
Топология облегчает аналитические функции.
3.4. Топологическое представление области
Топологическое представление области рассмотрим на примере карты областей (рис. 2.3.4)
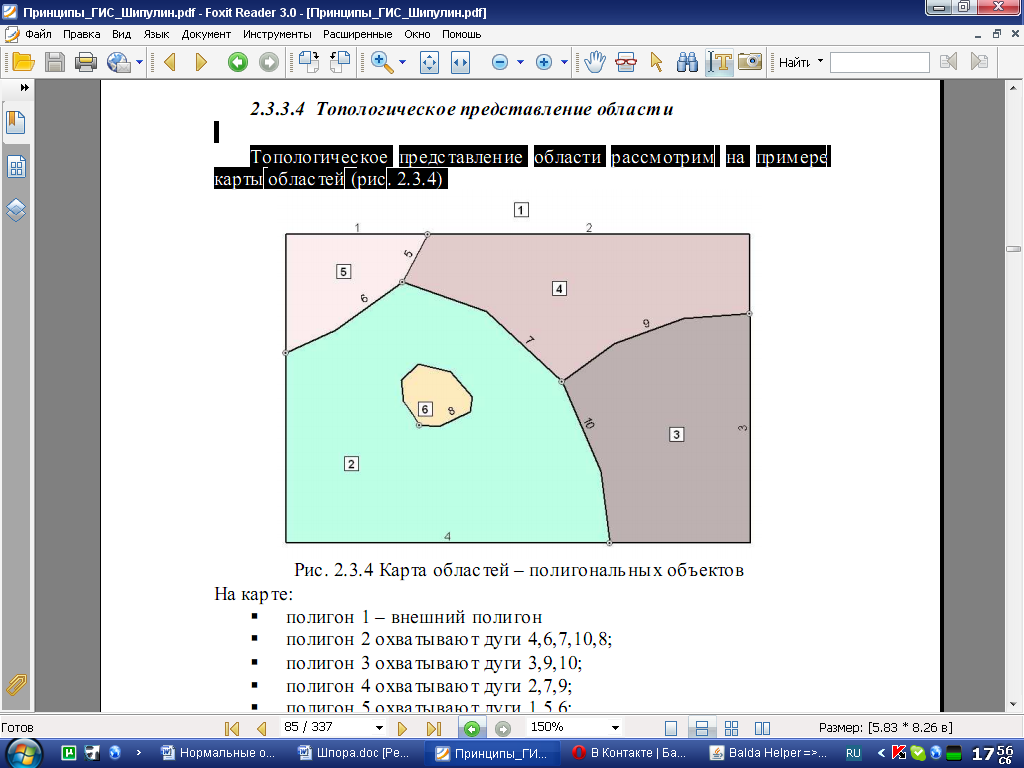
На карте:
полигон 1 – внешний полигон
полигон 2 охватывают дуги 4,6,7,10,8;
полигон 3 охватывают дуги 3,9,10;
полигон 4 охватывают дуги 2,7,9;
полигон 5 охватывают дуги 1,5,6;
полигон 6 охватывает дуга 8.
В ГИС топологическое представление области реализуется списком "Полигон – Дуга" и связанным с ним списком "Координаты дуг".
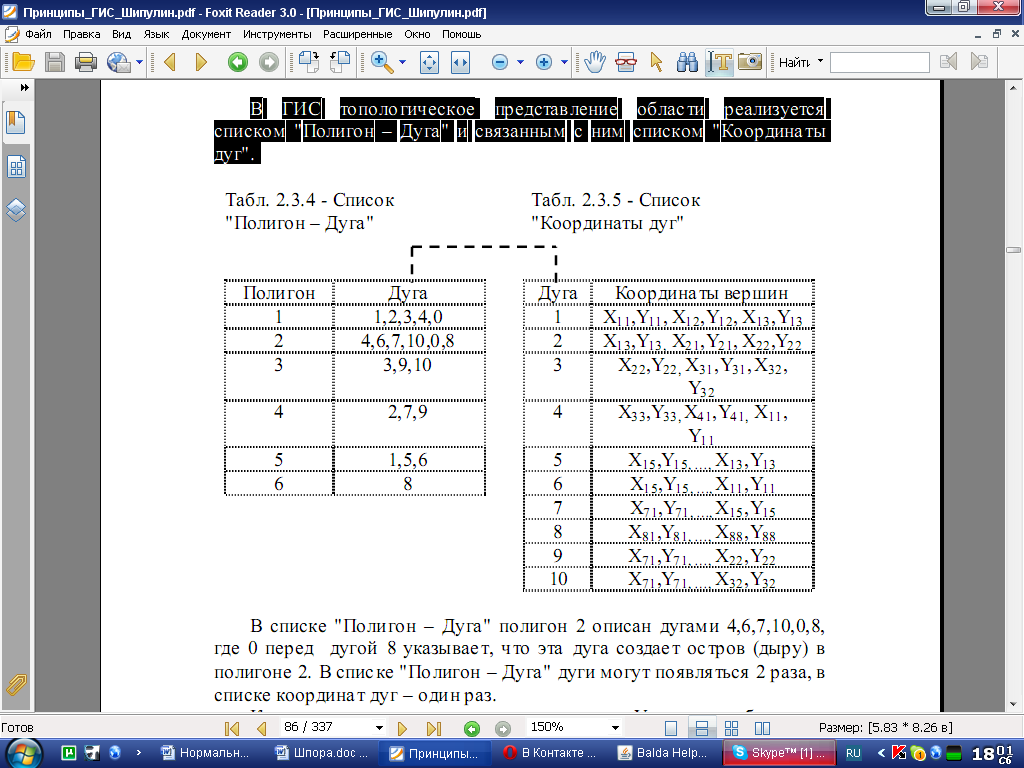
В списке "Полигон – Дуга" полигон 2 описан дугами 4,6,7,10,0,8,где 0 перед дугой 8 указывает, что эта дуга создает остров (дыру) в полигоне 2. В списке "Полигон – Дуга" дуги могут появляться 2 раза, в списке координат дуг – один раз. Конечными вершинами дуг являются узлы. Узел двух и большего числа дуг должен иметь в списке одни координаты.
Таким образом, топологическое описание области реализуется в цифровой форме двумя связанными списками.