

4. Значение ячеек растра
Каждая ячейка растра описывается тремя параметрами:
1) номер C колонки (Column),
2) номер R ряда (Row),
3) значение V ячейки (Value).
Эти параметры образуют позиционную и содержательную часть. Позиционная часть представляется номером строки и номером столбца. Содержательная часть представляется смысловым кодом - значением, с которым может быть связан неограниченный набор атрибутов. Значение – это элемент информации, хранящийся в ячейке растра. Как правило, каждая ячейка растра или сетки (грида) должна иметь лишь одно значение. Ячейкой фиксируется элементарный объект поверхности однородного (гомогенного) свойства. В случае, когда граница двух типов покрытий может проходить через часть элемента растра, значение ячейки может быть определено как:
среднее для всех значений в ячейке,
преобладающее значение из всех значений в ячейке,
значение в центре ячейки,
значение в угле ячейки.
5. Цветовые модели
В качестве примера рассмотрим кодирование цветового пространства.
Значения пространственных ячеек растров, определенных по аэрокосмическим снимкам, – это цветовые характеристики растра. Они несут богатую цветовую информативность. Цвета пространственных ячеек растров могут быть представлены в цифровом виде посредством определенной системы представления цветов. Цветовое пространство непрерывно. Любой цвет может быть получен в результате синтеза трех исходных базовых цветов.
Первичными базовыми цветами являются:
красный (R - Red);
зеленый (G - Green);
синий (B - Blue);
вторичными базовыми цветами являются:
голубой (C - Cyan);
пурпурный (M - Magenta);
желтый (Y - Yellow);
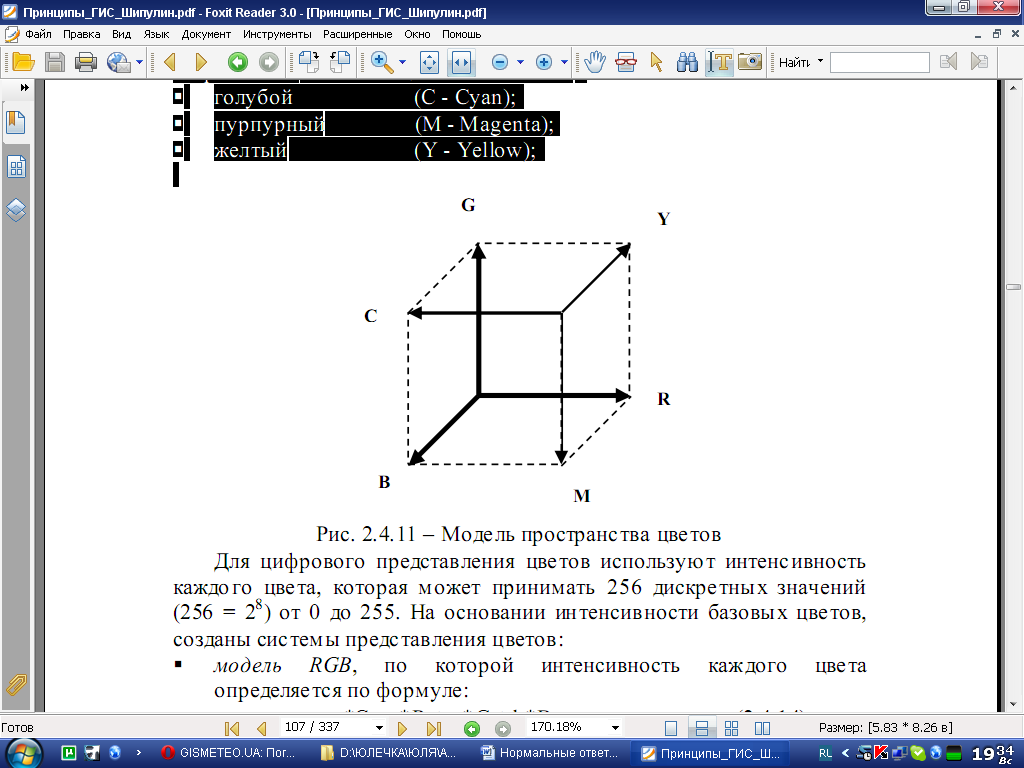
Для цифрового представления цветов используют интенсивность каждого цвета, которая может принимать 256 дискретных значений (256 = 28) от 0 до 255. На основании интенсивности базовых цветов, созданы системы представления цветов:
модель RGB, по которой интенсивность каждого цвета определяется по формуле:
с*C = r*R + g*G + b*B , (2.4.14)
где r,g,b – интенсивность цветов Red (R), Green (G), Blue (B) соответственно;
модель C,M,Y, по которой интенсивность каждого цвета определяется по формуле:
а*A = c*C + m*M + y*Y , (2.4.15)
где c,m,y – интенсивность цветов Cyan (С), Magenta (M), Yellow (Y) соответственно.
модели CMYK (+ blacK), HSB, Grayscall и др.
Количество цветов модели равно
256 * 256 * 256 = 16,7 млн.
Чем меньше интенсивность, тем темнее цвет. В модели RGB интенсивность всех 3 каналов равная 0 образует черный цвет
с*C = о*R + о*G + о*B, (2.4.16)
а интенсивность всех 3 каналов равная 255 образует белый цвет
с*C = 256*R + 256*G + 256*B. (2.4.17)
В модели RGB, например, рекреациям можно присвоить следующую интенсивность 3 каналов
с*C = 211*R + 252*G + 190*B. (2.4.18)
Таким образом, каждый цвет можно представить в цифровом виде в выбранной цветовой системе.