

Интерполирование на основе формулы Лагранжа
Один из наиболее распространенных способов построения интерполяционного полинома.
Введем
предварительно в рассмотрение так
называемые полиномы
влияния
 .
.
Этот полином должен удовлетворять следующим условиям:
степень полинома должна быть равна (n-1);


Очевидно, что полином степени (n-1) , равный нулю во всех узлах кроме i- того, имеет вид:

Остается
определить константы С из условия


Полином
Лагранжа обычно обозначают
 .
.
Очевидно, что

Рассмотрим два частных случая полинома Лагранжа:
Пусть имеется таблица из двух точек
|
|
|
|




Тогда интерполирующий полином будет выглядеть

Это так называемый случай линейной интерполяции, поскольку данное уравнение - это уравнение прямой.
Пусть имеется таблица из n=3 точек
|
|
|
|
|
|




Такое приближение называется параболическим или квадратическим (так как данное уравнение- уравнение параболы).
Рассмотрим пример.
Пусть задана таблица
|
|
|
|
|
|
|
|
|
|











Билет 18
Метод Рунге-Кута 4-ого порядка для решения задачи Коши формулы метода и их реализация в среде MathCad

 ;
;

___________________________________________________________________________



18.2 О наилучшем выборе узлов интерполирования

 зависит
от расположения узлов на интервале
интерполирования. Для сравнения приведем
значения и соответствующей таблицы:
ln(2,5)=0,9163.Пусть
f(x)
– интерполируемая функция. Заменим эту
функцию полиномом Лагранжа: f(x)=Ln-1+R(f,x).
R(f,x)
– остаточный член формулы Лагранжа,
который представляет собой погрешность
метода интерполяции. При выполнения
вычисления, результаты отдельных
арифметических операций округляются
или отсекаются из разряда, поэтому при
построении интерполяционного полинома
кроме погрешности метода будет
присутствовать еще вычислительная
погрешность. Можно доказать следующие
утверждение: если функция f(x)
n
раз непрерывно дифференцируема на
отрезке [a,b],
содержащем узлы интерполирования x1,
x2,
…., xn,
то
зависит
от расположения узлов на интервале
интерполирования. Для сравнения приведем
значения и соответствующей таблицы:
ln(2,5)=0,9163.Пусть
f(x)
– интерполируемая функция. Заменим эту
функцию полиномом Лагранжа: f(x)=Ln-1+R(f,x).
R(f,x)
– остаточный член формулы Лагранжа,
который представляет собой погрешность
метода интерполяции. При выполнения
вычисления, результаты отдельных
арифметических операций округляются
или отсекаются из разряда, поэтому при
построении интерполяционного полинома
кроме погрешности метода будет
присутствовать еще вычислительная
погрешность. Можно доказать следующие
утверждение: если функция f(x)
n
раз непрерывно дифференцируема на
отрезке [a,b],
содержащем узлы интерполирования x1,
x2,
…., xn,
то
 такая что
такая что
 ,
где wn(x)=
,
где wn(x)= .
Пусть Mn=
.
Пусть Mn= ,
,
 .
Понятно, чтобы использовать эту теорему
нужно иметь возможность взять производную
.
Понятно, чтобы использовать эту теорему
нужно иметь возможность взять производную
 .
Интерполяционный полином можно построить
единственным образом по данным таблицы.
Остаточный член R(f,x)
всегда имеет один и тот же вид. Возникает
вопрос: Можно ли выбрать такое количество
узлов на интервале интерполирования,
чтобы wi(x)
имело наименьшее максимальное значение
на интервале (a,b)
из всех возможных? Чебышев доказал, что
наилучшим выбором узлов будет следующий:
.
Интерполяционный полином можно построить
единственным образом по данным таблицы.
Остаточный член R(f,x)
всегда имеет один и тот же вид. Возникает
вопрос: Можно ли выбрать такое количество
узлов на интервале интерполирования,
чтобы wi(x)
имело наименьшее максимальное значение
на интервале (a,b)
из всех возможных? Чебышев доказал, что
наилучшим выбором узлов будет следующий:


В
этом случаи:
Узлы хi не являются равностоящими, а сужаются у концов интервала интерполирования.
Билет 19
Оценка погрешности решения оду. Способ Рунге для оценки такой погрешности.
Основная цель приближённых вычислений заключается в нахождении результата с заданной степенью точности. В частности для оценки точности решения ДУ можно использовать такие способы:
Проверка выполнения условия задачи (например данное численное решение можно подставить в само ДУ и сравнить расхождение с его правой частью)
Двойной пересчет по возможности другим методом
Применение упрощённой расчетной схемы и качественный анализ задачи.
Локальная погрешность тем меньше, чем меньше шаг, в то же время при большом количестве шагов суммарная погрешность может возрастать. Если же шаг увеличить хотя время решения задачи сократится полученная точность может не удовлетворять исследователя. Для приближенной оценки точности решения можно использовать способ Рунге.
Способ Рунге для оценки такой погрешности.
Предполагает,
что на зад.интервале решение выполняется
с постоянным по величине шагом, а затем
решение выполняется с удвоенным по
величине шагом H=2h.
Пусть при этом используется метод m-го
порядка точности. Тогда на отдельном
шаге h
величина локальной погрешности составит:
 .
.
Предполагаем, что c шагом h выполняется 2n шагов, тогда Н→n.
Предположение
на котором основан метод Рунге заключается
в том, что на отдельном шаге погрешность
равна:

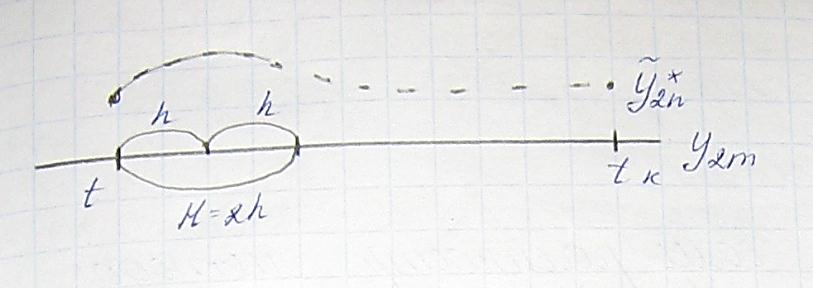

 -
приближенное решение в конечной точке
tk
после 2n
шагов величины h.
-
приближенное решение в конечной точке
tk
после 2n
шагов величины h.
 -
приближенное решение в точке tkпосле
n
шагов величиной H=2h.
-
приближенное решение в точке tkпосле
n
шагов величиной H=2h.
Y2n – неизвестное решение.
Считая на каждом шаге погрешность одинаковой, можно записать:

При вычислении с удвоенным шагом:


Система двух уравнений с двумя неизвестными A и Y2n. Решая, получим:


Уклонение точного решения от приближенного:

В частности для более распространенного метода Рунге-Кутта 4-го порядка (m=4):

Ещё
раз заметим, что в основе этой оценки
лежит предположение, что на отдельном
шаге погрешность равна
