

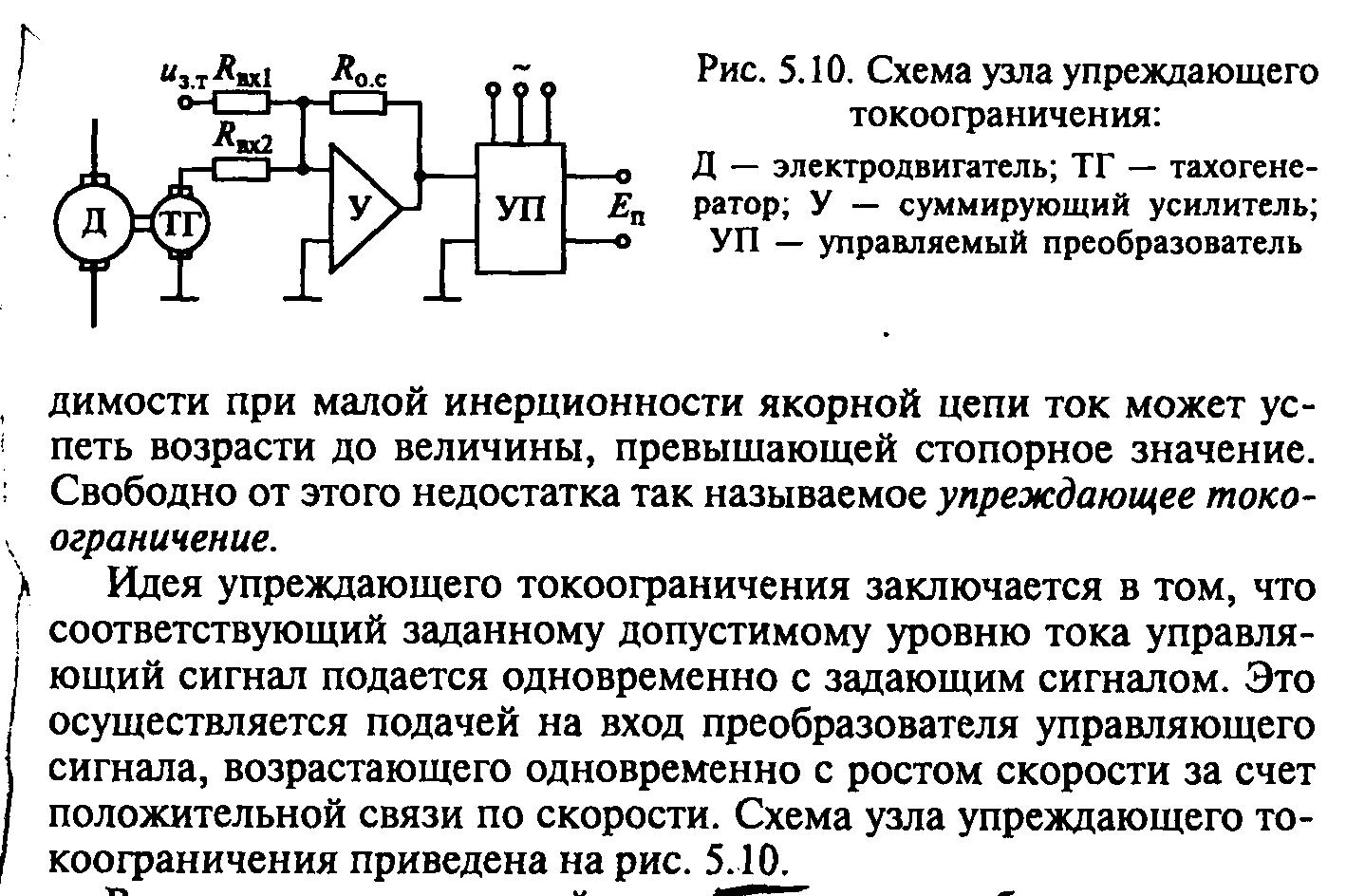
15. Способы ограничения тока (момента) электродвигателя в электроприводе
1) задержка ОС по току
2) ограничение на выходе регулятора скорости
1)Система с суммирующим усилителем
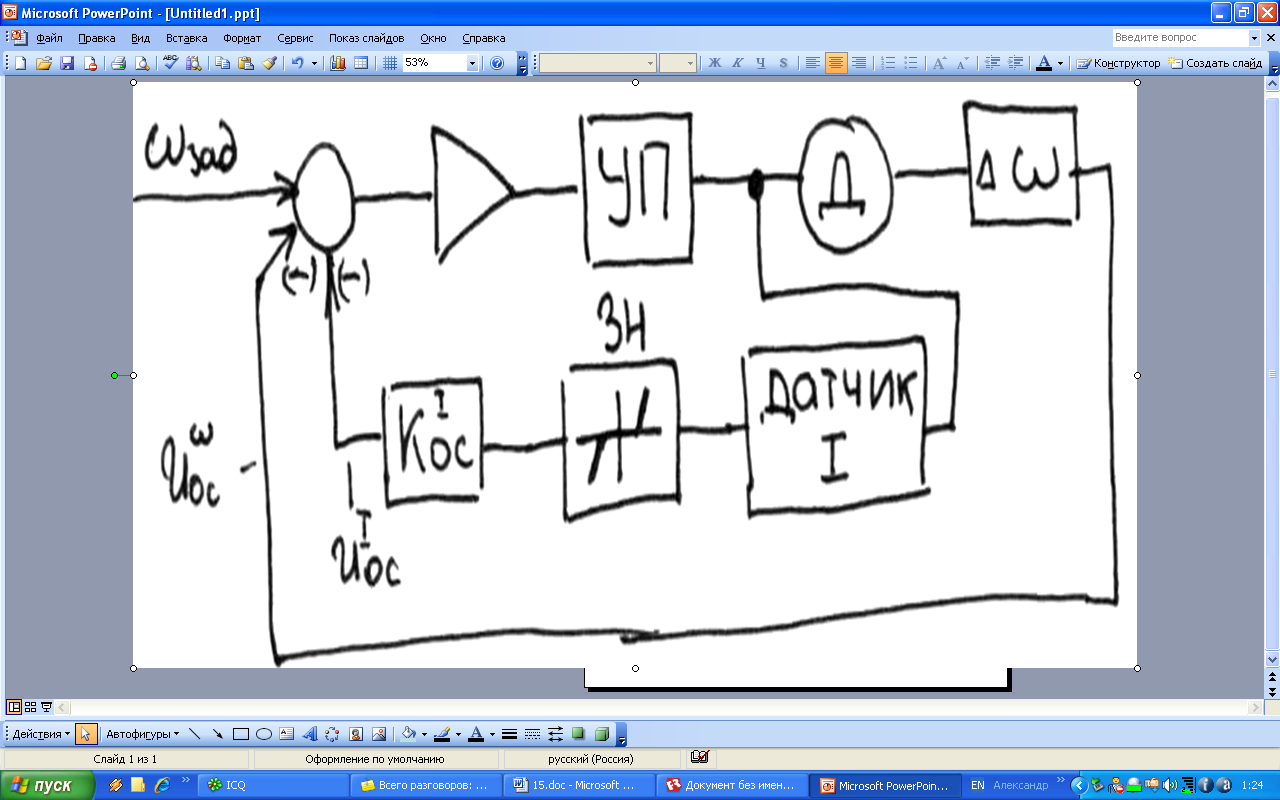
ЗН-звено (зона) нечувствительности dead zone мертвая зона
Iа – активный ток эл. машины
В первую очередь подается ток чтобы намагнитить машину а потом подается ток для ее работы
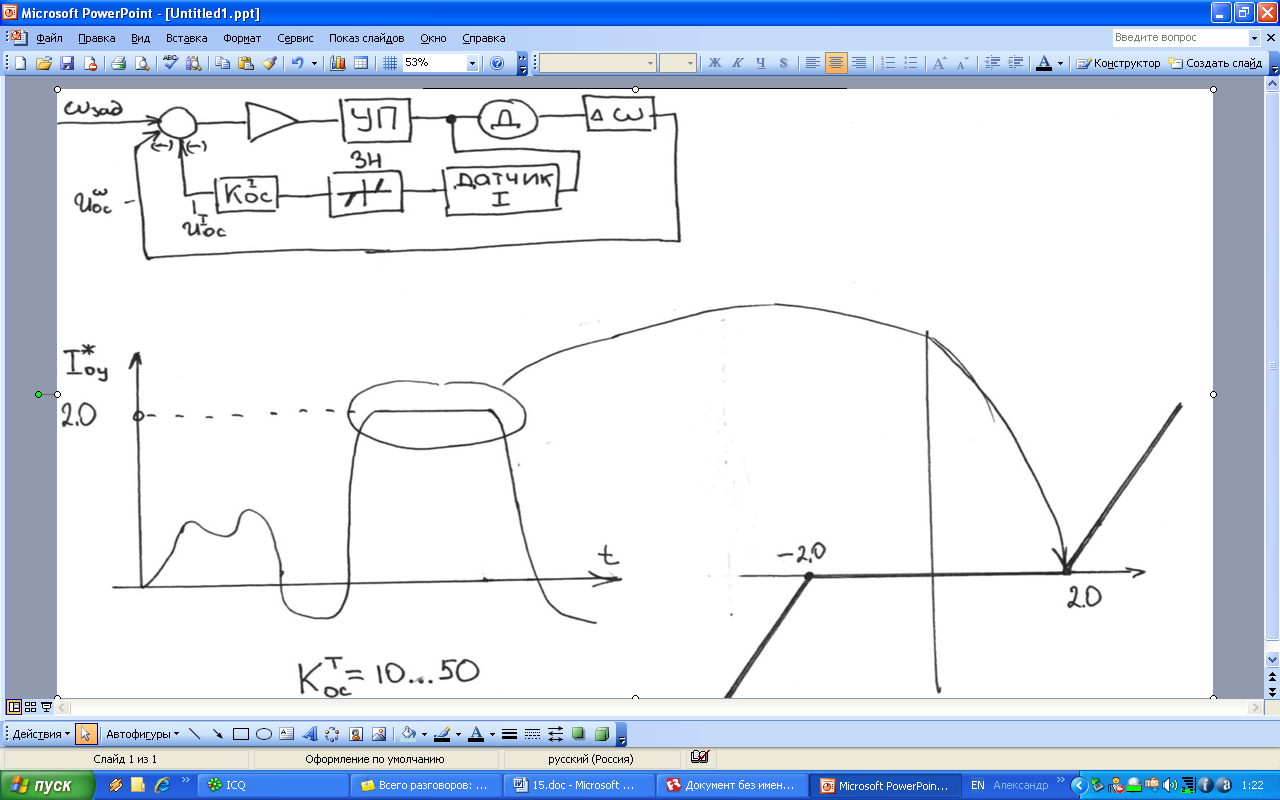
свойство
линейной системы таково, что отработка
разных по величине воздействий
осуществляется за одно и то же время
переходного процесса. Следовательно,
при увеличении, например, задающего
сигнала по скорости возрастают
одновременно ускорение и ток, значения
которых могут

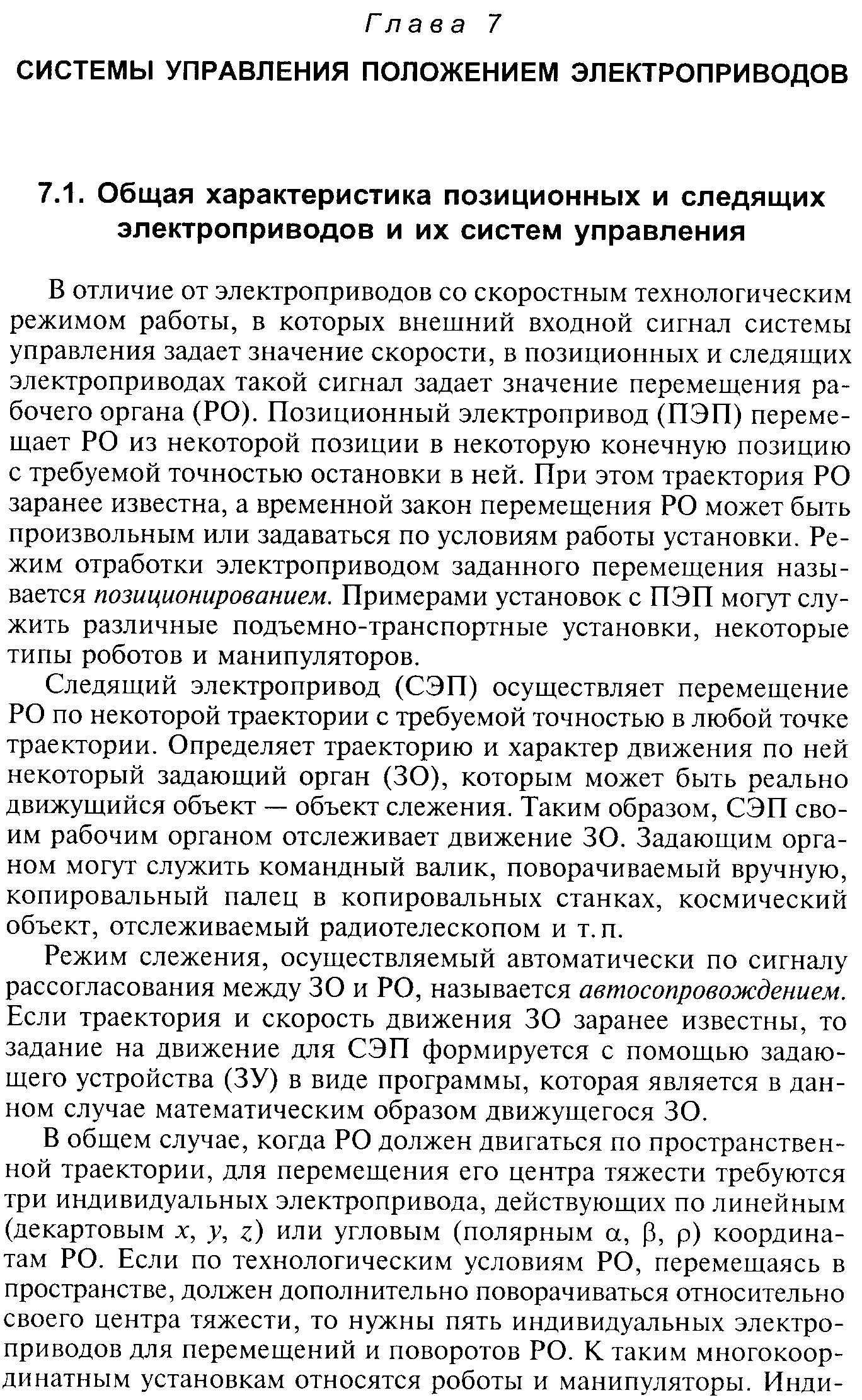
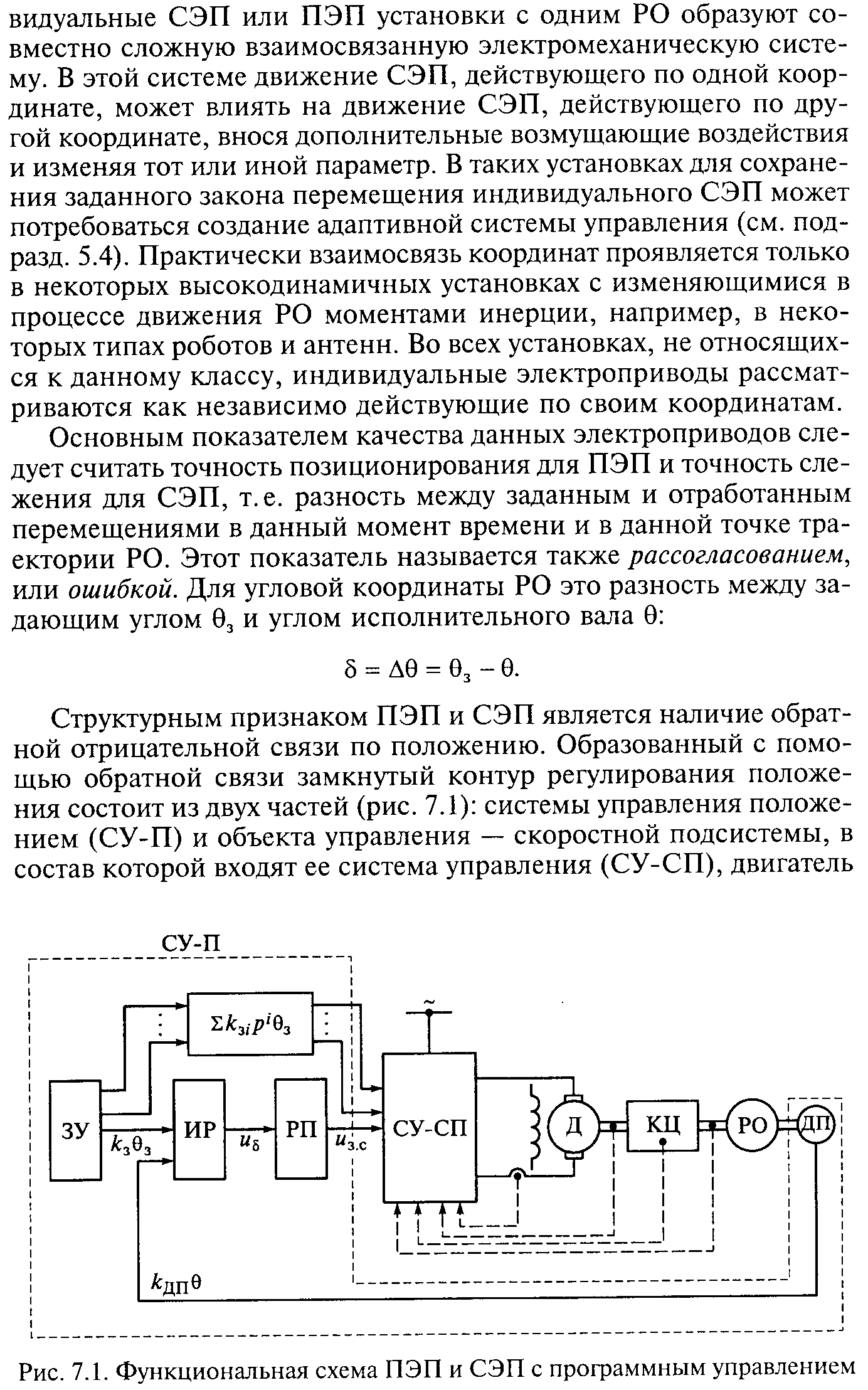
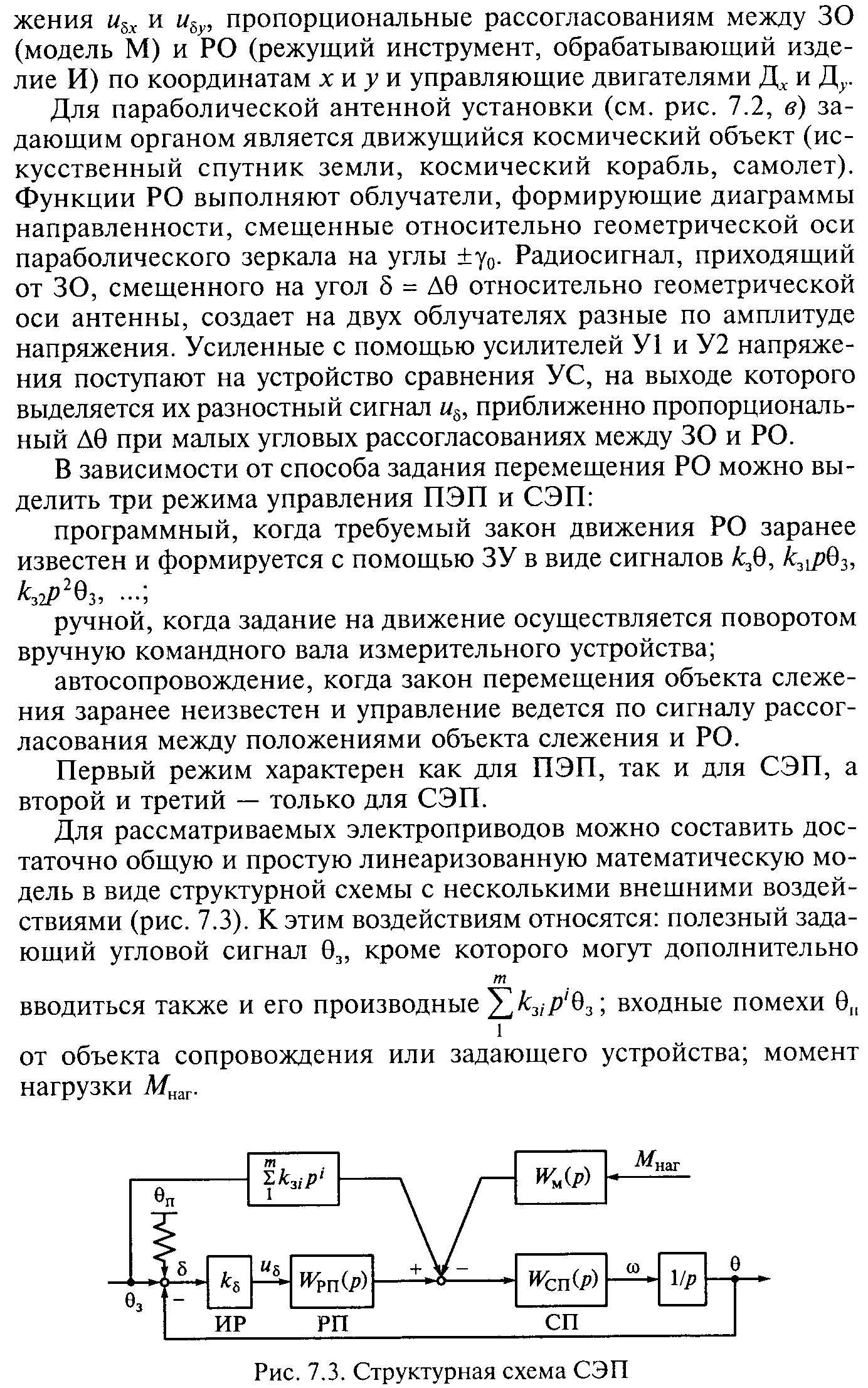
16. Непрерывные системы управления положением механизма
17. Понятие об адаптивных с.У.
Адаптивными С.У. наз такие С.У., к-рые в условиях непредвиденного изменения свойств управляемого объекта, внешних воздействий, изменяют структуру или параметры своего управляющего устройства, обеспечивая при этом необходимое качество управления. Для осуществления адоптации эти системы содержат дополнительное управляющее устройство, к-рое по результатам измерения сигналов в главном контуре управления выявляет изменение свойств внешних воздействий и объекта и производит необходимые изменения в управляющем устройстве. Применения таких систем управления возникает в случаях, когда условия функционирования и свойства управляемого объекта изменяются в широких пределах и по заранее неизвестным законам(шахтные подъёмные установки, добычные механизмы, шаровые мельницы).
Изменяемые параметры электропривода: момент инерции( из-за измен массы груза в подъемно-транспортных установках, взаимосвязи механических координат в многокоординатных манипуляторах и роботах), индуктивность в цепях возбуждения с насыщением магнитной системы, коэф усиления в управляемых преоб из-за измен энергетического уровня ист пит, акт сопр-ие в силовых цепях из-за измен температурного режима.
Адаптивные системы бывают: самонастраивающиеся, системы со стабилизацией качества управления, системы с оптимизацией качества управления.
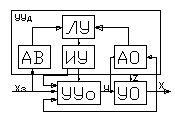
Обобщенная функц схема адаптивной С.У.
УО-управляем объект
УУо-осн управ устр
УУд-дополн управ устр
АО-анализ объекта
АВ-анализ внешн возд
ЛУ-логич устр
18. Суэп на основе аппарата нечеткой логики
Д![]() ля
нечет множества ФП является непрерывной
ля
нечет множества ФП является непрерывной
ФП для нечет множ-ва имеют смысл в вероятности появление конкретного значения Х. Обычно непрерывные ФП задают в виде кус.-линейных ф-ий. Пример: температура в помещении
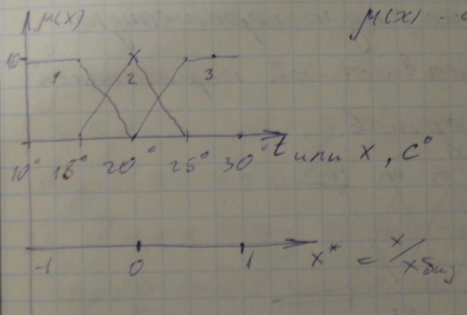
Для построения СУ необх выполнить приведение нуля шкалы переменной Х к середине интервала измерения. В данном примере возможные значения переменной аппроксимированы тремя ф-ми принадлежности. Обычно используют 7 ф-ий принадлежности (ФП). ФП – терм. Их совокупность образует лингвистическую переменную.
N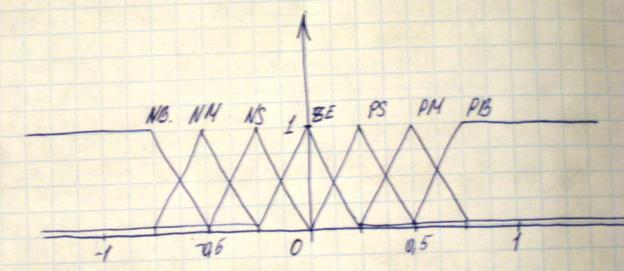 – отриц, P
– положит, M
– среднее,B
– большое, S
– мал, Z
– ноль.
– отриц, P
– положит, M
– среднее,B
– большое, S
– мал, Z
– ноль.
Основные особ-сти представления реал переменных в виде нечетких множеств: 1) переем-я должна быть нормирована и нулевое значение приведено к середине интервала измер 2) если для ФП испол-ют кусочно-линейные ф-ии то переем-я должна иметь равномерный характер распределения плотности вероятности 3) переход от непрерывного представления к аппроксимации в виде простых ф-ий существенно увел скорость расчета управляющих воздействий
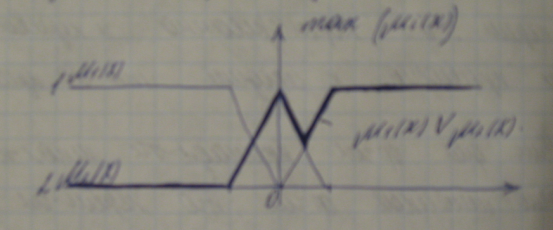
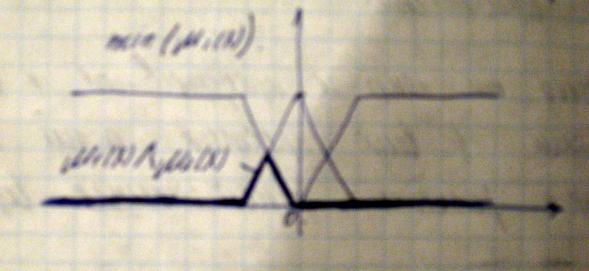
Правила объединения нечетких множеств:
1) объединение – дизъюнкция «или» 2) пересечение множеств - конъюнкция
Функциональная структура неч регулятора:
1![]() )
)
2) блок1 – выполняет отображение непрерывных переменных на неч мн-ва.
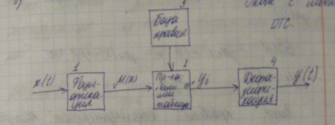
Мю (х) – лингвистические переменные, у – вых-я лингв. Переменная
В![]() ычисление
вых лингв перем:
ычисление
вых лингв перем:
1 способ – на основе базы правил которая опред-ет знач вых переменной в зависимости от текущих значений лингв переем-ых мю(х). ( ЕСЛИ мю1(х)=РВ и мю2(х)=РВ то у =NB и т.д. Базу правил формируют эксперты в предметной обл.
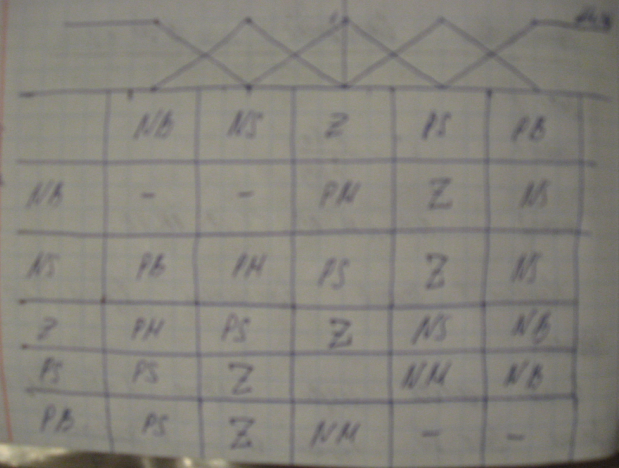 2 способ – кроме
представления «ЕСЛИ…, то» правило
задают в форме таблицы, которую можно
заполнить применяя стандартные правила
вычисл вых-ой лингвис-ой переменной.
2 способ – кроме
представления «ЕСЛИ…, то» правило
задают в форме таблицы, которую можно
заполнить применяя стандартные правила
вычисл вых-ой лингвис-ой переменной.
Д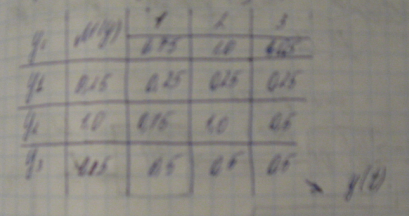
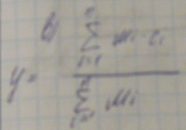 ефаззификация
заключается в вычислении непрерывного
значеиния выхода у
по известному набору выходных
лингвистических переменных.
ефаззификация
заключается в вычислении непрерывного
значеиния выхода у
по известному набору выходных
лингвистических переменных.