

Б№1 Назначени и класификация систем управления электроприводами
назначение Сформировать и осуществить совокупность управляющих воздействий на двигатель обеспечивающих необходимое по технологическим и технико экономическим требованиям движения рабочего органа производственной установки. (задачи) 1. Стабилизацию некоторой координаты объекта управления. 2.Програмное управление по заранее известному закону. 3. Слежение за некоторой измеряемой величиной закон измирения которой заранее известен. 4. Самонастройку СУ на оптимум какого либо показателя объекта управления.
Авторизироваеые системы подразделяются на 2 типа: незамкнутые—без учета результатов упрвляющего воздействия на объект управления. замкнутые-с учетом через обратные связи результата воздействия на объект управления. Для замкнутых систем основным принципом управления является принцип обратной связи, означающий упраление по отклонению результата от задания. Дополнение к этому принципу является комбинированное управление когда кроме отклонения от задания вводится в упрвление возмущающие воздействие или дополнительно производственные величины задания. Дополнительыми признаками классификации являются: Уровень управления- верхний(технологический) нижний(формирующий свойства электропривода). Тип двигателя, Способы управления(модальное управление, каскадное управление, частотное скалярное управление, частотное вектороное управление). Технологическая координата электропривода(скорость рабочего органа, положение рабочего органа).
Б№2 Логические переменные, их свойства операции над ними. Комбинационные и последовательные устроцства обработки логических данных.
Комбинационные микросхемы
F(x)-
фу-ия логической обработки вектора
![]() .
Основная особенность комбинационных
микросхем в том, что значение на выходе
определяется тоько значением комбинационных
сигналов подаваемых на вход.
.
Основная особенность комбинационных
микросхем в том, что значение на выходе
определяется тоько значением комбинационных
сигналов подаваемых на вход.
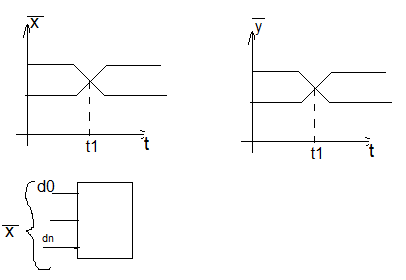
Типы комбинационных схем:
-логические элнмнеты И,ИЛИ,НЕ
-дешифратор(преобразует 2 код)
- память
память
-ПЛМ(программ. логическая матрица)
2. Последовательные микросхемы. Основное св-во
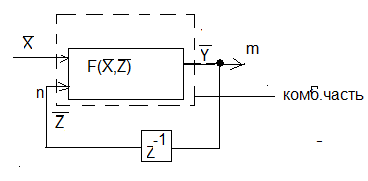
Памяить на 1 такт
Yi=f(![]() )
)
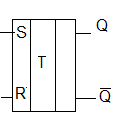
триггер RS, SR,D,JK. S-установлено 1, R- сбро 0

-
R S
Q
0 1
1 0
0 0
1 1
1
0
Qi-1
запрещенно
Логические функции
Коньюкция- ИЛИ
Дизюкция И
Законы алгебры
логики:![]() =а,
а+…+а=nа=а;
а+
=а,
а+…+а=nа=а;
а+![]() =1
=1
Переместительный закон: ав=ва, а+в=в+а:
Сочетательный закон: (а+в)+с=а+(в+с)
Закон поглащения:а(а+в)=а: а(а+в)(а+w)=а: а+ав=а: а+ав+..+аw=а
Закон склеивания.
ав+а![]() =а:
(а+в)(а+
)=а
=а:
(а+в)(а+
)=а
Закон Моргана:![]() :
:
![]()
![]() :
:
![]()
Б№3 Релейно-контакторные системы управления
Под термином РКСУ понимают логические системы управления построенные на релейно-контакторной элементной базе и осуществляющие автоматизацию работы двигателей. В задачу РКСУ входит автомаизация следующих процессов:
включение и отключение двигателей, выбор направления и скорости вращения, пуск и торможение двигателя, создание временных пауз в движении, защитное отключение двигателя и остановка механизма. Непосредственным объектом управления для РКСУ является двигатель питаемый от сети. К достоинствам РКСУ относится:наличие гальванической развязки цепей, значительную коммутационную мощность, высокую помехоустойчивость, возможность использования единичного источника питания для силовых и управляющих цепей. Недостатки РКСУ являются: контактная коммутация, требующая соотетствующего ухода за аппаратурой и ограничивающая срок ее службы; ограниченное быстродействие; повышенные массогабаритные показатели и энергопотребление. В составе РКСУ можно выделить по функциональному назначению 2 части. Управляющую формирующую алгоритм управления и исполнительную, непосредственно осуществляющая управляющие воздействие на двигатель.
Общая функциональная схема РКСУ.
На ней изображен функциональный состав РКСУ в виде узлов и отмечена их взаимосвязь. Важнейшей типовой фу-ей возлагаемой на РКСУ является защита электрической и механической частей электро привода от аварийных режимов. Аварийными режимами в цепях двигателя могут быть короткие замыкания, кратковременные и длительные перегрузки , перебои в электроснабжении.
4. Защиты в электроприводе
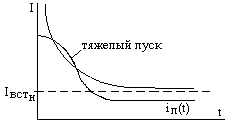
1.1.1Максимально-токовая защита Назначение - защита от токов к.з. Осуществляется плавкими предохранителями, автоматическими выключателями с максимально-токовыми расцепителями, реле максимального тока. 1)Защита АД с КЗР (IП) 1.1)с помощью плавкой вставки а) нормальный пуск (tП < 5с):IВСТ.Н = 0,4IП; б) тяжелый пуск (tП 10с):IВСТ.Н = 0,6IП = 3IН. Плавкая вставка при длительных пере-грузках не защищает. Чтобы плавкая вставка за время пуска не перегорела, пусковая диаграмма двигателя должна лежать ниже время-токовой зависимости плавкой вставки (см. рисунок 2.20).
 1.2)с
помощью автоматических выключателей
и реле максимального тока
IУ =
(1,2+1,3)IП.
2)Защита АД с ФР и ДПТ (I1
2,5 IН)
2.1) с помощью плавких
вставок :IВСТ 1,25 IН; 2.2) с помощью
автоматов и реле максимального тока:
IУ 1,25 I1.
Схему управления
двигателей при мощности меньше 10 кВт
защищают теми же аппаратами, при Р
10 кВт - своими.
1.1.2Минимально-токовая
защита
Защита СД и ДПТ от обрыва цепи
обмотки возбуждения. Осуществляется с
помощью реле минимального тока (РОП -
реле обрыва поля), которое включается
в цепь контролируемой обмотки.
1.1.3Тепловая
защита
Осуществляет защиту двигателя
от перегрева, вызванного перегрузкой
по току:а) при длительном режиме с помощью
теплового реле и автоматов с тепловыми
расцепителями;б) в повторном кратковременном
режиме с помощью реле максимального
тока.
Общим
недостатком рассмотренных узлов защиты
от перегрузки является их низкая точность
(двигатель и шкаф могут находиться в
разных помещениях, при разных температурах
и т.п.), поэтому более точная защита
строится на теплосопротивлениях, которые
закладываются в обмотки ЭД .
Часто АД
имеют перегрузку по току из-за обрыва
одной из фаз. Поэтому косвенно защиту
от перегрузки можно построить, контролируя
все фазы двигателя с помощью реле
напряжения (РОФ). Оно включается между
искусственным нулем и нулевой точкой
фаз . У двигателей большой мощности
подключается через трансформатор тока.
При
повторно-кратковременном режиме тепловую
защиту осуществляет реле максимального
тока.
1.1.4Нулевая защита (защита от
самозапуска)
Обеспечивает отключение
двигателя при снижении напряжения сети
ниже допустимого, исключает
несанкционированное включение при
появлении напряжения сети.
Осуществляется:а)
при кнопочном управлении с помощью
линейных контакторов КЛ ;б) при управлении
командоконтроллером с помощью специального
реле напряжения РН. РН выполняет
в схемах так же и собирательную функцию,
в цепь катушки РН включают контакты
всех аппаратов защиты, которые есть в
схеме. Последовательное включение двух
контактов РН понижает надежность сети,
но повышает надежность работы защиты.
Работа
схемы: Для первоначального включения
схемы ключ S необходимо перевести в
нулевое положение, при этом получит
питание катушка РН (при отсутствии
аварийной ситуации в электроприводе)
и встанет на самопитание через свой
контакт РН. После этого, при переводе S
влево или вправо включается соответствующий
контактор. При снижении напряжения ниже
допустимого отключается РН и,
соответственно, ранее включенный
контактор. Повторное включение схемы
возможно лишь через нулевое положение
ключа управления S.
В тех случаях, когда требуется
самозапуск двигателя его подключение
к питающей сети осуществляется либо
через QF, либо через тумблер при малой
мощности двигателя.
1.1.5Защита от
затянувшегося, либо несостоявшегося
пуска СД
Защита пусковой обмотки от
длительного тока осуществляется с
помощью реле обрыва поля и реле
времени.Реле с выдержкой времени при
отпускании (tУРВ tП ДОП =
(1060)с).
Алгоритм
защиты: Если в течении времени, равном
уставке РВ не произойдет подача напряжения
на обмотку возбуждения, т.е. не включится
РОП, пуск следует считать несостоявшимся
и статор должен быть отключен от питающей
сети.
1.1.6Защита от выпадания из
синхронизма
Назначение: защищает
СД, работающий с резкопеременной
нагрузкой от выпадания из синхронизма
при снижении напряжения сети.
Осуществляется
с помощью реле форси-ровки (реле
напряжения), посредством которого
повышается напряжение на обмотке
возбуждения .
Угловая характеристика
показывает как меняется М в зависимости
от угла . UC < UCН; UВ < UВН -
допускается в течении очень короткого
времени. При снижении напряжения на 20%
отключается РФ и включается КФ, который
шунтирует RДОБ в цепи обмотки возбуждения
возбудителя. Это вызывает увеличение
напряжения и восстановление перегрузочной
способности двигателя приблизительно
на прежний уровнь.
1.1.7Защита от
перенапряжений
Назначение: защищает
обмотку возбуждения ДПТ и СД от
перенапряжений, вызванных отключением,
либо обрывом це-пи.Осуществляется с
помощью разрядных рези-сторов, которые
включаются как можно ближе к клеммам
этих обмоток .
Разрядный резистор RP
выбирается из условий ограничения
перенапряжений на уровне UПЕР СР
1000В. 1) UН = 110В; RP = 9 RВ; 2) UН = 220В;
RP = 4,5 RВ; 3) UН = 440В; RP = 2,25 RВ.
Чтобы в нор-мальном состоянии
при замкнутом ключе рези-стор не обтекался
током ставят диод. IВН = UН / RВ, UПЕР СР =
IВН RВ.
Примеры схем защиты от
перенапряжения:1)неуправляемая схема
;Напряжение вдвое понижается, а ток не
снижается (ток гасится). 2) неуправляемая
схема;3) полууправляемая схема;
1.1.8Защита
от превышения напряжения и
скорости
Осуществляется с помощью
реле макси-мального напряжения и, как
правило, центробеж-ного датчика скорости
.
1.1.9Путевая защита
Назначение:
запрещает движение рабочего органа
механизма далее конечного положения.
Ззащита
осуществляется путевыми
выключателями.
1.2Блокировки в системах
АЭП
Назначение: блокировки повышают
надежность систем АЭП за счет организации
правильного порядка работы схем.
По
назначению блокировки делятся:- защитные;-
технологические.По исполнени:- внутренние
(в данной АЭП);- внешние.
1.2.1Защитные
блокировки
1) Блокировка замыкающего
контакта пусковой кнопки (см. рисунок
2.39), где К - обеспечивает самопитание
контактора при отпускании кнопки и
нулевую защиту.2) Блокировка реверсивных
контакторов. Исключает
одновременное включение реверсивных
контакторов, одновременное срабатывание
которых вызывает короткое замыкание
питающей сети. 2.1) С помощью раз-мыкающих
контактов пусковых кнопок. 2.2) С помощью
размыкающих блок-контактов контакторов.2.3)
С помощью механической блокировки
подвижных частей контактора (принцип
качель).
Для повышения общей надежности
при реализации схем кроме механической
блокировки ставят одну из электрических
блокировок.3) Блокировки путевые (аналог
путевой защиты).
1.2.2Технологические
блокировки
Обеспечивают определенную
последовательность работы схем. Реле
времени КТ3 выполняет роль внутренней
технологической блокировки (РДТ), которое
запрещает включение контактора
противоположного направления, пока не
закончилось динамическое торможение.
1.2)с
помощью автоматических выключателей
и реле максимального тока
IУ =
(1,2+1,3)IП.
2)Защита АД с ФР и ДПТ (I1
2,5 IН)
2.1) с помощью плавких
вставок :IВСТ 1,25 IН; 2.2) с помощью
автоматов и реле максимального тока:
IУ 1,25 I1.
Схему управления
двигателей при мощности меньше 10 кВт
защищают теми же аппаратами, при Р
10 кВт - своими.
1.1.2Минимально-токовая
защита
Защита СД и ДПТ от обрыва цепи
обмотки возбуждения. Осуществляется с
помощью реле минимального тока (РОП -
реле обрыва поля), которое включается
в цепь контролируемой обмотки.
1.1.3Тепловая
защита
Осуществляет защиту двигателя
от перегрева, вызванного перегрузкой
по току:а) при длительном режиме с помощью
теплового реле и автоматов с тепловыми
расцепителями;б) в повторном кратковременном
режиме с помощью реле максимального
тока.
Общим
недостатком рассмотренных узлов защиты
от перегрузки является их низкая точность
(двигатель и шкаф могут находиться в
разных помещениях, при разных температурах
и т.п.), поэтому более точная защита
строится на теплосопротивлениях, которые
закладываются в обмотки ЭД .
Часто АД
имеют перегрузку по току из-за обрыва
одной из фаз. Поэтому косвенно защиту
от перегрузки можно построить, контролируя
все фазы двигателя с помощью реле
напряжения (РОФ). Оно включается между
искусственным нулем и нулевой точкой
фаз . У двигателей большой мощности
подключается через трансформатор тока.
При
повторно-кратковременном режиме тепловую
защиту осуществляет реле максимального
тока.
1.1.4Нулевая защита (защита от
самозапуска)
Обеспечивает отключение
двигателя при снижении напряжения сети
ниже допустимого, исключает
несанкционированное включение при
появлении напряжения сети.
Осуществляется:а)
при кнопочном управлении с помощью
линейных контакторов КЛ ;б) при управлении
командоконтроллером с помощью специального
реле напряжения РН. РН выполняет
в схемах так же и собирательную функцию,
в цепь катушки РН включают контакты
всех аппаратов защиты, которые есть в
схеме. Последовательное включение двух
контактов РН понижает надежность сети,
но повышает надежность работы защиты.
Работа
схемы: Для первоначального включения
схемы ключ S необходимо перевести в
нулевое положение, при этом получит
питание катушка РН (при отсутствии
аварийной ситуации в электроприводе)
и встанет на самопитание через свой
контакт РН. После этого, при переводе S
влево или вправо включается соответствующий
контактор. При снижении напряжения ниже
допустимого отключается РН и,
соответственно, ранее включенный
контактор. Повторное включение схемы
возможно лишь через нулевое положение
ключа управления S.
В тех случаях, когда требуется
самозапуск двигателя его подключение
к питающей сети осуществляется либо
через QF, либо через тумблер при малой
мощности двигателя.
1.1.5Защита от
затянувшегося, либо несостоявшегося
пуска СД
Защита пусковой обмотки от
длительного тока осуществляется с
помощью реле обрыва поля и реле
времени.Реле с выдержкой времени при
отпускании (tУРВ tП ДОП =
(1060)с).
Алгоритм
защиты: Если в течении времени, равном
уставке РВ не произойдет подача напряжения
на обмотку возбуждения, т.е. не включится
РОП, пуск следует считать несостоявшимся
и статор должен быть отключен от питающей
сети.
1.1.6Защита от выпадания из
синхронизма
Назначение: защищает
СД, работающий с резкопеременной
нагрузкой от выпадания из синхронизма
при снижении напряжения сети.
Осуществляется
с помощью реле форси-ровки (реле
напряжения), посредством которого
повышается напряжение на обмотке
возбуждения .
Угловая характеристика
показывает как меняется М в зависимости
от угла . UC < UCН; UВ < UВН -
допускается в течении очень короткого
времени. При снижении напряжения на 20%
отключается РФ и включается КФ, который
шунтирует RДОБ в цепи обмотки возбуждения
возбудителя. Это вызывает увеличение
напряжения и восстановление перегрузочной
способности двигателя приблизительно
на прежний уровнь.
1.1.7Защита от
перенапряжений
Назначение: защищает
обмотку возбуждения ДПТ и СД от
перенапряжений, вызванных отключением,
либо обрывом це-пи.Осуществляется с
помощью разрядных рези-сторов, которые
включаются как можно ближе к клеммам
этих обмоток .
Разрядный резистор RP
выбирается из условий ограничения
перенапряжений на уровне UПЕР СР
1000В. 1) UН = 110В; RP = 9 RВ; 2) UН = 220В;
RP = 4,5 RВ; 3) UН = 440В; RP = 2,25 RВ.
Чтобы в нор-мальном состоянии
при замкнутом ключе рези-стор не обтекался
током ставят диод. IВН = UН / RВ, UПЕР СР =
IВН RВ.
Примеры схем защиты от
перенапряжения:1)неуправляемая схема
;Напряжение вдвое понижается, а ток не
снижается (ток гасится). 2) неуправляемая
схема;3) полууправляемая схема;
1.1.8Защита
от превышения напряжения и
скорости
Осуществляется с помощью
реле макси-мального напряжения и, как
правило, центробеж-ного датчика скорости
.
1.1.9Путевая защита
Назначение:
запрещает движение рабочего органа
механизма далее конечного положения.
Ззащита
осуществляется путевыми
выключателями.
1.2Блокировки в системах
АЭП
Назначение: блокировки повышают
надежность систем АЭП за счет организации
правильного порядка работы схем.
По
назначению блокировки делятся:- защитные;-
технологические.По исполнени:- внутренние
(в данной АЭП);- внешние.
1.2.1Защитные
блокировки
1) Блокировка замыкающего
контакта пусковой кнопки (см. рисунок
2.39), где К - обеспечивает самопитание
контактора при отпускании кнопки и
нулевую защиту.2) Блокировка реверсивных
контакторов. Исключает
одновременное включение реверсивных
контакторов, одновременное срабатывание
которых вызывает короткое замыкание
питающей сети. 2.1) С помощью раз-мыкающих
контактов пусковых кнопок. 2.2) С помощью
размыкающих блок-контактов контакторов.2.3)
С помощью механической блокировки
подвижных частей контактора (принцип
качель).
Для повышения общей надежности
при реализации схем кроме механической
блокировки ставят одну из электрических
блокировок.3) Блокировки путевые (аналог
путевой защиты).
1.2.2Технологические
блокировки
Обеспечивают определенную
последовательность работы схем. Реле
времени КТ3 выполняет роль внутренней
технологической блокировки (РДТ), которое
запрещает включение контактора
противоположного направления, пока не
закончилось динамическое торможение.
5. Конечные автоматы – определение, математическое описание, диаграммы и таблицы переходов и выходов.
Автомат - общее название устройств, предназначенных для обработки входной информации по заданному алгоритму с целью: определения, принадлежит ли информация некоторому множеству; порождения соответствующей выходной информации; выработки соответствующих управляющих воздействий. Цели могут быть достигнуты отдельно или в совокупности.
Под конечным автоматом понимается разновидность автоматов в которой ограничены множества входных и выходных сигналов а также ограничено множество состояний.
![]() I
– Вектор в выходных данных в общем
случае понимаются символы а также
сигналы
I
– Вектор в выходных данных в общем
случае понимаются символы а также
сигналы
Y – вектор выходных воздействий автомата (может может не использоваться)
Q – вектор внутренних состояний автомата
Способы описания поведения автоматов
1. На основе функций переходов и выходов
Поведение автомата полностью определено, если заданы множества X, Y, Q, и функции - δ и λ:
δ: Q х X → Q, функция перехода . λ: Q х X → Y, функция выхода
где Q - множество состояний автомата;X - множество входных сигналов;Y - множество выходных сигналов; δ - функция переходов в следующее состояние; λ - функция выходов.
Функции δ и λ есть декартово произведение множеств Q на X
Ф унции переходов определяет новое состояние в которое переходит автомат под действием сигнала I из состояния Q
Функция выходов определяет выходное воздействие автоматов под действием выходного сигнала I
Ii х Qi → Yi,
Разновидностью функций является секвинциальные последовательности
Секвенция – означает следование некоторый шаг. xi+qi → qi+1
2 Таблица переходов – способ представления автоматов. Таблица переходов - двухвходовая таблица, строки которой отмечены входными сигналами, а столбцы - состояниями автомата. На пересечении строки, отмеченной сигналом х, и столбца, отмеченного состоянием q, записывают состояние (qt, xt) = qt + l, в которое автомат переходит из состояния q под воздействием сигнала х
Например, пусть заданы множества X = {а, b, с} и Q = {1, 2, 3, 4}. Тогда таблице переходов некоторого автомата может соответствовать табл. 1.
Таблица 1. Представление автомата в виде таблицы переходов.
|
1 |
2 |
3 |
4 |
a: |
2 |
2 |
2 |
4 |
b: |
1 |
3 |
1 |
4 |
c: |
1 |
1 |
4 |
4 |
В данном примере переход δ (а, 2) = 2; δ (c, 4) = 4, и так далее. Такие переходы соответствуют единичным (символьным) воздействиям. Иногда рассматривают цепочку воздействий, или строковые воздействия. Для автомата, поведение которого задано табл. 1, возможны следующие цепочки воздействий: δ (bc, 2) = 4; δ (bbb, 3) = 1. Первую функцию переходов определяют такие единичные воздействия: δ (b, 2) = 3; δ (с, 3) = 4, вторую - δ (b, 3) = l; δ (b, l) = l; δ (b, l) = l.
3.Диаграмма переходов.Представление автомата в виде ориентированного графа - множества узлов (или вершин), связанных в определенном порядке ребрами (дугами), - является более наглядным. При этом вершины соответствуют состояниям автомата, а ребра - входным сигналам. Такое представление также называют диаграммой переходов.Например, таблица переходов (табл. 1) будет представлена в виде диаграммы переходов так, как показано на рис. 1.
Р ис1.
Представление автомата в виде направленного
графа (диаграммы переходов).
ис1.
Представление автомата в виде направленного
графа (диаграммы переходов).
Недостатками представления автомата в форме диаграммы переходов является отсутствие … полноты контроля автоматов