

13.Динамический фактор и динамические характеристики
Д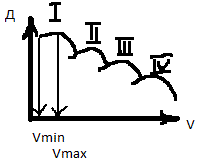 инамический
фактор- разница между силой тяги в
ведущих колесах и сопротивлением
воздушной среды, приходящейся на единицу
массы авто.
инамический
фактор- разница между силой тяги в
ведущих колесах и сопротивлением
воздушной среды, приходящейся на единицу
массы авто.
Д
= (Рк-Рw)/G
=
 ,
где Рк
– сила тяги, Рw
– сила сопротивления воздушной среды,
G
– вес авто, δ
– коэф. влияния вращающихся масс, g
– ускорение силы тяжести, I
– относительное
ускорение авто. Рк=Mk/zk=
М
ik
i0ηtηэiд/zk
, где iк
– передаточное число коротких передач
(в справочнике), i0
– передаточное число главных передач,
iд
– дополнительных, ηt
– механич. коэф. полезного действия
трансмиссии, ηэ
– коэф. эксплуатационного состояния
двигателя, К – коэф. обтекания авто
(устанавл. заводом), F
– ходовая площадь авто, Pw
– сила сопротивления воздуха. Pw
=KFV2/13.
,
где Рк
– сила тяги, Рw
– сила сопротивления воздушной среды,
G
– вес авто, δ
– коэф. влияния вращающихся масс, g
– ускорение силы тяжести, I
– относительное
ускорение авто. Рк=Mk/zk=
М
ik
i0ηtηэiд/zk
, где iк
– передаточное число коротких передач
(в справочнике), i0
– передаточное число главных передач,
iд
– дополнительных, ηt
– механич. коэф. полезного действия
трансмиссии, ηэ
– коэф. эксплуатационного состояния
двигателя, К – коэф. обтекания авто
(устанавл. заводом), F
– ходовая площадь авто, Pw
– сила сопротивления воздуха. Pw
=KFV2/13.
Динамическая характеристика авто – это график, по вертикали – динамический фактор, по горизонтали – скорость. Повышение тяговой динамичности авто должно сопровождаться улучшением его конструктивной безопасности, усовершенствованием дорожных условий и организации движения. Это обусловлено тем, что увеличение скорости движения желательно для сокращения времени доставки грузов и пассажиров, увеличения производительности подвижного состояния, а верхний предел скорости ограничивается опасностью возникновения ДТП.
14.Особенность макс. Продольного уклона.
Продольный уклон – это отклонение проектной линии от горизонтали.
Макс. Продольный уклон рассчитывают по силе тяги и по сцеплению.
Для определения необходимо знать: тип покрытия, скорость движ автро.
Imax=((Pt-Pw)/G)-fv (по тяге)
Imax=(φ*(Gсц-Pw)/G)-fv (по сцеплению)
G- вес авто
ф-коф сцепления
fv- коэфф. сопротивления качению при скорости Ѵ.
15. Торможение автомобиля.
- это процесс принудительного снижения Ѵ или остановки ТС.
Различают:
-полное-торможение до полной остановки авто.
-рабочее- с целью регулирования скорости т.с.
-служебное- торможение, замедление кот не больше 3 м/с.
-стояночное – торможение, с целью удерж. ТС в неподвижном состоянии
-экстренное – с целью максимального снижения скорости.
При торможении кинетическая энергия а/м ум-ся .
G =>
=>

Тормозной путь:
Sт=V*t/3.6
+ Kэ(V12-V22)/0.54(φ±l)
+
t=t1+t2+t3
t1- время сработки тормазов
t2-время торможения
t3-зависит от типа торможения системы(мех-кие, пневматические, гидравлические)
- расстояние между а/м и препятствием
16. Требования к видимости на а.Д.
Видимостью на дороге наз. мин зона видимости пути в направлении движения за капотом а/м, с кот водитель воспринимает информацию в усл дор движения необходимую для безопасности управления ТС с расчетной Ѵ и иметь возможность своевременно принять меры для остановки перед препятствием.
Осн. требование:
Sфак >=Soст
Sфак – фактическая видимость.
Soст- расчётная видимость.
Расчетная видимость при торможении авто перед объектом:
Socт
=(Vt + *Kэ/254(φ±i+f))
+ l0
*Kэ/254(φ±i+f))
+ l0
v- cкор движ
t – cумм. время реакции водителя и срабатывания тормозов
Кэ – коэфф эксплуатац состояния
Фи- коэфф сцепления
I – продольный уклон
f- коэффициент сопротивления качению
l0- запас(расст между останов авто и объектом)
далее в след вопросе
Sвид² =(Vt/2 + *Kэ/127(φ±i+f)) + l0