4.Уравнения типовых звеньев автоматики.
Уравнение элемента – дифференциальное или алгебраическое уравнение, связывающее между собой выходную(y(t)) и входную(x(t)) величину элемента. Для основных элементов такое описание имеется и сводится к типовым линейным уравнениям 1 порядка. При записи уравнений слева от равно записывается выходная величина со всеми преобразованиями, справа – входная.
1.Алгебраическое уравнение Y(t)=kX(t)
Описывает маломощный электрический усилитель, датчики, механические передачи. Типовое звено – безъинерционное, К – статический коэффициент передачи.
2. Дифференциальное уравнение 1 порядка.
Это
уравнение может иметь производную по
входной или выходной величинам, рассм.
Наличие по выходной величине: a Стандартная запись в ТАУ осуществляется
таким образом, что коэффициент при
y(t)<1.
В результате получим уравнение:
Стандартная запись в ТАУ осуществляется
таким образом, что коэффициент при
y(t)<1.
В результате получим уравнение:
 ,Т – постоянная
времени. Такое уравнение имеет типовое
инерционное звено 1 порядка. Частные
случаи:А). Т=0 – безъинерционное звено.Б).
Коэффициент при Y(t)=0
,
,Т – постоянная
времени. Такое уравнение имеет типовое
инерционное звено 1 порядка. Частные
случаи:А). Т=0 – безъинерционное звено.Б).
Коэффициент при Y(t)=0
, - идеальный интегратор, таким звеном
можно описать интегрирующий операционный
усилитель или двигатель, работающий с
постоянным вращающим моментом. Если
присутствует производная входного
сигнала
- идеальный интегратор, таким звеном
можно описать интегрирующий операционный
усилитель или двигатель, работающий с
постоянным вращающим моментом. Если
присутствует производная входного
сигнала
 +
+
 )
– форсирующее звено. Частные случаи:Б1).Т=0
– безъинерционное звено.Б2).Коэффициент
при x(t)=0
,
)
– форсирующее звено. Частные случаи:Б1).Т=0
– безъинерционное звено.Б2).Коэффициент
при x(t)=0
,
 – идеальный дифференциатор. Если в
уравнении присутствует производная
входного сигнала, то звено обладает
форсирующими свойствами. В). Производная
на двух сигналах
– идеальный дифференциатор. Если в
уравнении присутствует производная
входного сигнала, то звено обладает
форсирующими свойствами. В). Производная
на двух сигналах
 +
+
 )
– инерционно – форсирующее звено.
Возможно 2 случая:Т1>T2
В этом случае в звене преобладают
дифференционные свойства, если наоборот
– форсирующие.Если коэффициент при
Y(t)=0
– изодромное звено. Если коэффициент
при х(t)=0
– реальный дифференциатор.
)
– инерционно – форсирующее звено.
Возможно 2 случая:Т1>T2
В этом случае в звене преобладают
дифференционные свойства, если наоборот
– форсирующие.Если коэффициент при
Y(t)=0
– изодромное звено. Если коэффициент
при х(t)=0
– реальный дифференциатор.
3. Дифференциальное уравнение 2 порядка.
 1.)Если Т2>T1
– корни характерестического уравнения
отрицательные и действительные, описывает
типовое инерционное звено 2ого порядка.
Такими звеньями описываются все мощные
инерционные устройства эл-магн типа,
когда учитывается эл-магн постоянная
времени. Если Y(t)=0
– уравнение интегратора с инерционностью.
2).Если 2Т1>T2
– корни уравнения комплексно сопряженные
с отрицательной вещественной частью.
1.)Если Т2>T1
– корни характерестического уравнения
отрицательные и действительные, описывает
типовое инерционное звено 2ого порядка.
Такими звеньями описываются все мощные
инерционные устройства эл-магн типа,
когда учитывается эл-магн постоянная
времени. Если Y(t)=0
– уравнение интегратора с инерционностью.
2).Если 2Т1>T2
– корни уравнения комплексно сопряженные
с отрицательной вещественной частью.
 ,
,

 =0
– типовое консервативное звено.
=0
– типовое консервативное звено.
4.
В отдельных системах автоматики(передача
топлива по трубам, звука по длинным
линиям) возникают задержки – звено
чистого запаздывания. Т

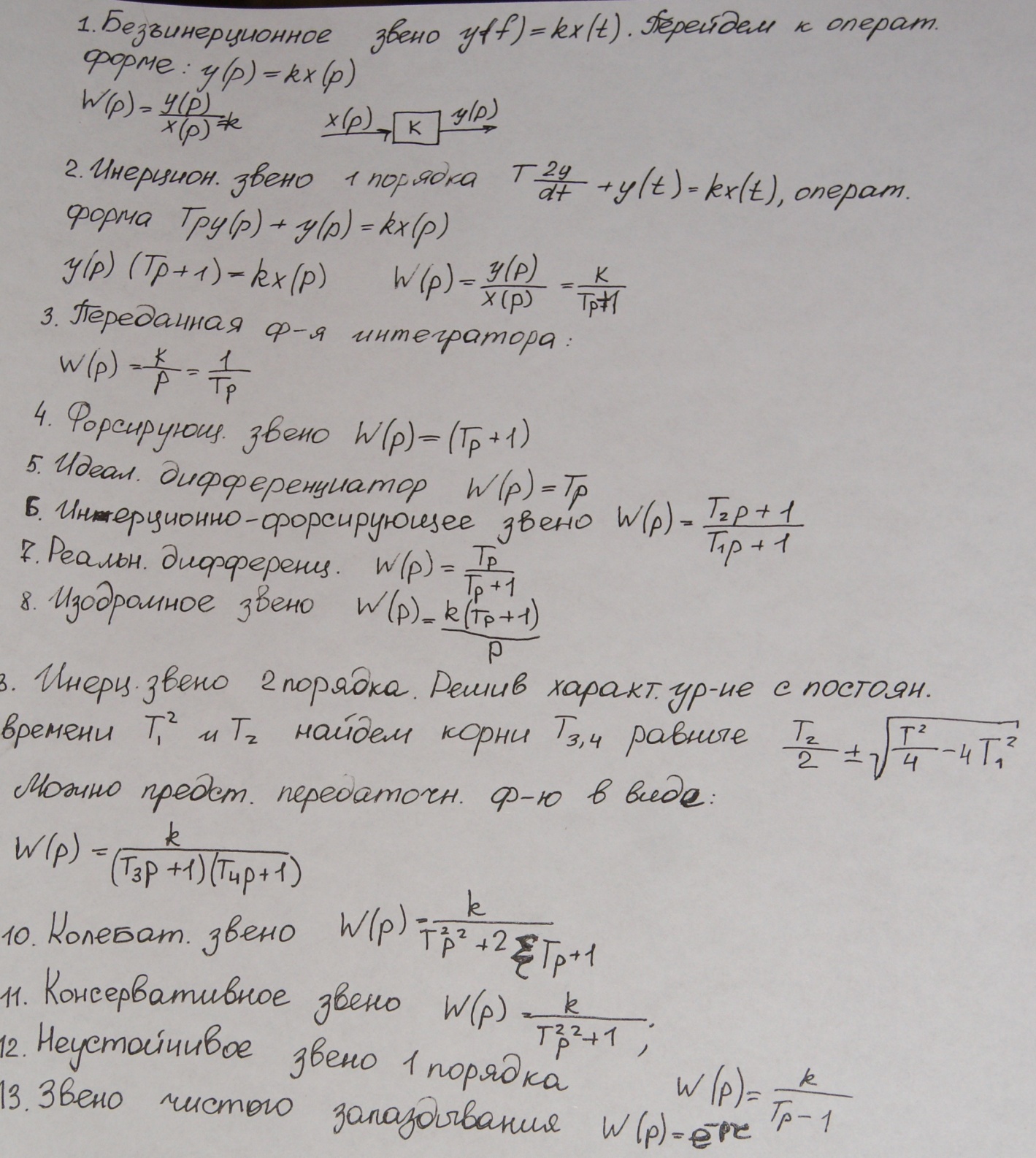
5.Передаточные функции типовых звеньев.
Для
описания динамических свойств в ТАУ
используют понятие передаточных функций.
Для их получения используют преобразование
Лапласа, для чего преобразуют линейное
уравнение элемента таким образом , что
функция времени преобразуется в функцию
f(p)
комплексного оператора Р. L{f(t)}= Также
существует обратное преобразование,
чтобы по изображению можно получить
оригинал. Передаточная функция –
отношение изображения выходной величины
к изображению входной величины при
нулевых начальных условиях W(p)=
Также
существует обратное преобразование,
чтобы по изображению можно получить
оригинал. Передаточная функция –
отношение изображения выходной величины
к изображению входной величины при
нулевых начальных условиях W(p)=
6. Функциональные и структурные схемы.
Функциональная схема – схема в которой каждому функциональному элементу соответствует определенное звено. Структурная – схема, в которой математическим описаниям каждого функционального блока соответствует определенное звено, т.е. в структурной схеме каждое звено может содержать уравнение связывающее входную и выходную величину или передаточную функцию.
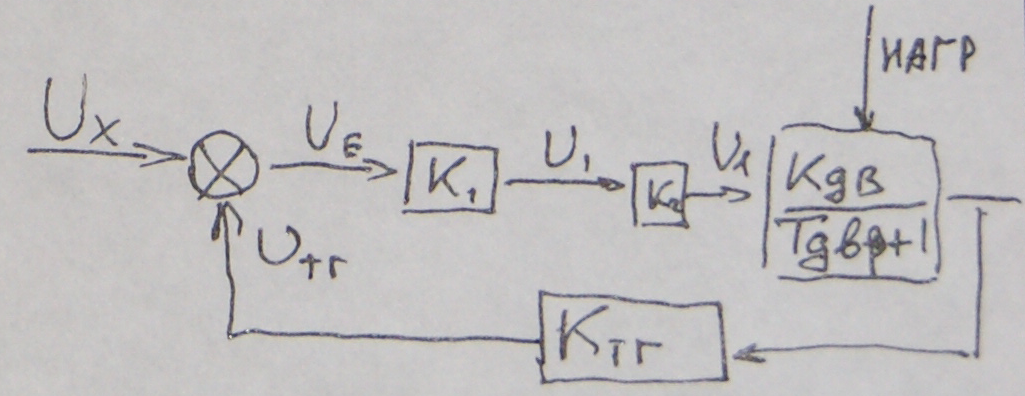
Схема стабилизации частоты вращения двигателя.
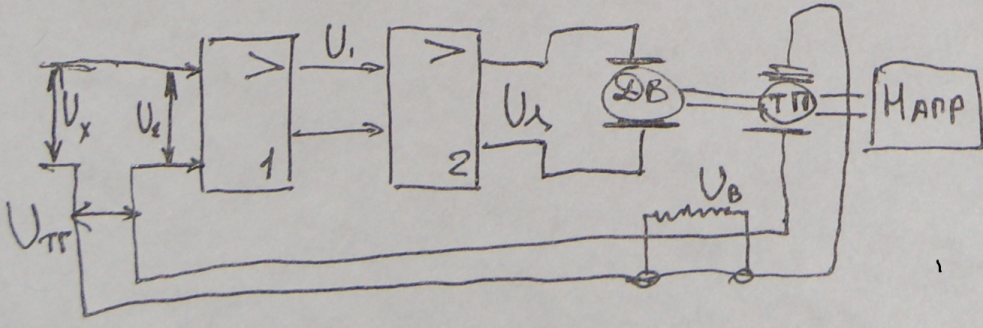
Система содержит предварительный усилитель 1, усилитель мощности 2, на выходе которого напряжение для управления двигателем на обмотке якоря Uя двигатель Дв, на валу которого закреплена нагрузка Нагр. В качестве датчика обратной связи используется тахагенератор, закрепленный на валу двигателя, на выходе которого напряжение Uтг пропорционально частоте вращения двигателя. На вход подается сигнал Uх из которого вычитается Uтг, образуя сигнал рассогласования Uλ .Устройство, которое производит вычисление ε(t) – измеритель рассогласования. Если известна величина нагрузки, по ней можно выбрать по мощности двигатель. По механическим характеристикам двигателя можно найти Uλ0 которое гарантирует частоту ω0 на выходе двигателя. По статическому коэффициенту передачи усилителя мощности можно найти напряжение U1 и величину Uε0,гарантирующего ω0. По заданной частоте вращения подбираем тахагенератор и по его характеристикам ищем Uтг0.Из уравнения измерителя рассогласования
Uε= Uх- Uтг, при известных Uε0 и Uтг0 найдем Uх0., такой входной сигнал необходимо подать на систему чтобы обеспечить частоту ω0.Пусть выбран двигатель небольшой мощности, усилитель мощности, предварительный усилитель, все датчики – безъинерционные. Запишем уравнения выбранных элементов:1).Измеритель рассогласования Uε= Uх- Uтг 2).Предварительный усилитель 1 U1= UεК1 3).Усилитель мощности Uλ= U1К2
4).Двигателя
Тдв Kдв
Uλ
5). Тахагенератор
Uтг
= ωКтг
Kдв
Uλ
5). Тахагенератор
Uтг
= ωКтг
Переходя к операторной форме можно получить передаточные функции
1).
Uε(р)=
Uх(р)-
Uтг(р)
2).W1(р)=K1
3).W2(р)=K2
4).Wдв(р)= 5).Wтг(р)=Kтг
5).Wтг(р)=Kтг