

Общие сведения об управлении.
Основные задачи ТАУ
Способы построения САУ
Уравнения типовых звеньев автоматики
Передаточные функции типовых звеньев
Функциональные и структурные схемы.
Правила преобразования структурных схем
Вспомогательные правила преобразования структурных схем.
Свойства основных соединений
Передаточные функции разомкнутой и замкнутой системы
Передаточная функция замкнутой системы по ошибке
Передаточная функция замкнутой системы по возмущению
Характеристики систем и звеньев. Временные характеристики систем
Импульсная переходная характеристика
Частотные характеристики систем
Амплитудно-фазовая характеристика замкнутой системы
АФХ разомкнутой системы
Логарифмические частотные характеристики
Построение логарифмических характеристик типовых сомножителей
Устойчивость системы. Определение устойчивости линейной системы по виду корней характеристического уравнения
Критерий устойчивости Рауса-Гурвица
Практика применения критерия Гурвица
Критерий Михайлова
Критерий Найквиста-Михайлова
Понятие запаса по фазе и амплитуде
Логарифмический критерий устойчивости
Примеры на исследование устойчивости системы с помощью разных критериев
Показатели качества САУ. Точность отработки постоянных входных и возмущающих воздействий
Анализ отработки полиномиальных входных сигналов
Анализ точности при медленно меняющихся входных произвольных сигналов
Анализ точности отработки гармонических входных сигналов
Методы повышения точности
Неединичные обратные связи
Практический метод синтеза систем с неединичной ОС
Понятие об инвариантных системах.
1. Общие сведения об управлении, объекте управления
Цель курса ТАУ- изучение общих принципов построения систем АУ (САУ);процессов, в их происхождениях, методов исследования этих процессов, методов синтеза САУ с заданными показателями качества.
Кибернетика-наука об общих закономерностях процессов управления, и основывается на изучении объектов управления при различных воздействиях, получении информации о протекании процессов в объектах, и на основании этого выработки управляющих взаимодействий, обеспечивающих наилучшее в заданном смысле состояние объекта.
Главным принципом в кибернетике явл. Принцип обратной связи.
Техническая кибернетика делиться на 2 составляющих:
Теоретическая информация устройств и систем- связанную со сбором и переработкой информации, необходимой человеку для управления технической системой. Т.е. приходим к понятию Автоматизированной системы управления (АУ)
АУ- это когда управляющее воздействие на основе той же информации вырабатывается автоматически.
Под управлением понимается автоматическое действие, выполняющее желаемое изменение в процессе, основанная на цели управления.
В технике цель управления может быть самой различной, например она может заключаться в поддержании изменения температуры, скорости вращения, давления- при различных внешних воздействиях- это системы стабилизации.
Первоначально ТАУ развивался как теоретическое автоматическое регулирование. Поэтому термины «Регулировка» и «управление» синонимы.
Устройство, параметры могут меняться по какому то закону, называется объектом управления (ОУ), им может быть что угодно, емкость с жидкостью, различные двигатели, генераторы и т.д. На ОУ может действовать различные воздействия . некоторые из них измеряются и наз. Контролируемыми.
Одно из самых главных воздействий- управляющее, поступает от управляющего устройства, все остальные воздействия-возмущения.
Возмущения можно разделить на 2 вида:
Нагрузка- или особенности эксплуатации объекта, то что происходит при синтазе
Непредусмотренные помехи- пульсация постоянного напряжения
Контролируемые
величины- наз. Управляемыми или
регулируемые 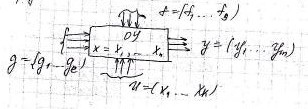 U-
вектор управляющих величин, поступающих
от устройства управлении
U-
вектор управляющих величин, поступающих
от устройства управлении
d-вектор контролируемых возмущений
f-вектор неконтролируемых возмущений
y-вектор регулируемых величин
x-вектор состояния объекта
Отдельные компоненты векторов х и у могут совпадать. При этом m<n . Если управление U имеет несколько величин и вектор у так же несколько-то объект называеться сложным или многосвязным.
Если вектор U и у имеют по одной координате, то объект называют простым или односвязным.
Компоненты управления при односвязном объекте:
Объект управления характеризуется регулируемой величиной Х
Вводиться цель управления- регулируемая величина Yзад=X зад
Управляющее устройство способное организовать управление U, обеспечивающее выполнение Y=Yзад, как оказалось Y-это выходная величина системы, чаще всего Yзад- входная величина системы
Объекты управления и система в целом рассматриваются в условиях статики и динамики. В условиях динамических или переключательных процессах система описывается диф. Уравнениями. В условиях статики (рабочий режим) когда переключательные процессы закончены система характеризуеться статичным коэфициэнтом передачи.