Кинематика материальной точки. Тело отсчета. Прямолинейное движение. Движение тела в пространстве. Декартова система координат. Система отсчета.
Кинематика - это раздел физики, посвящённый математическому описанию движения без анализа причин, приводящих к его возникновению или изменению.
Материальная точка, понятие, вводимое в механике для обозначения тела, размерами и формой которого можно пренебречь по условию задачи.
Тело отсчета - произвольно выбранное тело, относительно которого определяется положение движущейся материальной точки (или тела).
Прямолинейное движение — механическое движение, при котором вектор перемещения ∆r не меняется по направлению и по величине равен длине пути, пройденного телом.
Движение
тел совершается в пространстве с течением
времени. Пространство в механике мы
рассматриваем, как трехмерное евклидово
пространство. Время является скалярной,
непрерывно изменяющейся величиной. В
задачах кинематики время ![]() принимают
за независимую переменную (аргумент). Все
другие переменные величины (расстояния,
скорости и т. д.) рассматриваются как
изменяющиеся с течением времени, т, е.
как функции времени
.
принимают
за независимую переменную (аргумент). Все
другие переменные величины (расстояния,
скорости и т. д.) рассматриваются как
изменяющиеся с течением времени, т, е.
как функции времени
.
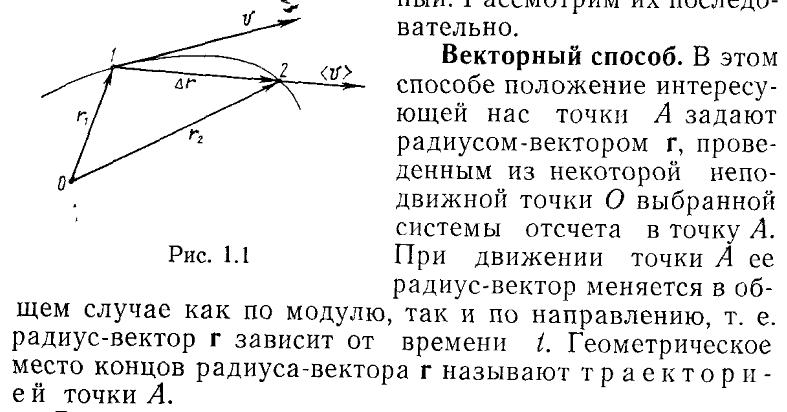
Кинематически задать движение или закон движения тела - значит задать положение этого тела относительно данной системы отсчета в любой момент времени. Для задания движения точки можно применять один из следующих трех способов: 1) векторный, 2) координатный, 3) естественный.
Естественным способом задания движения удобно пользоваться в тех случаях, когда траектория движущейся точки известна заранее.
Системой координат называется совокупность одной или более пересекающихся координатных осей, точки, в которой эти оси пересекаются, – начала координат – и единичных отрезков на каждой из осей. Каждая точка в системе координат определяется упорядоченным набором нескольких чисел – координат. В конкретной невырожденной координатной системе каждой точке соответствует один и только один набор координат.
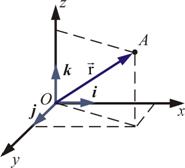
Если в качестве координатных осей берутся прямые, перпендикулярные друг другу, то система координат называется прямоугольной (или ортогональной). Прямоугольная система координат, в которой единицы измерения по всем осям равны друг другу, называется ортонормированной (декартовой) системой координат. В декартовой системе координат, положение точки А в данный момент времени по отношению к этой системе характеризуется тремя координатами x, y, z или радиус-вектором, проведенным из начала координат в данную точку.
 При движении
материальной точки её координаты с
течением времени изменяются. В общем
случае её движение определяется
скалярными уравнениями:
При движении
материальной точки её координаты с
течением времени изменяются. В общем
случае её движение определяется
скалярными уравнениями:
|
x = x x=x(t), y = y (t), z = z (t). |
Система отсчёта — это совокупность тела отсчёта, системы координат и системы отсчёта времени, связанных с этим телом, по отношению к которому изучается движение (или равновесие) каких-либо других материальных точек или тел.
Радиус-вектор, скорость и ускорение материальной точки, их связь с дек. Координатами.
 При движении
материальной точки её координаты с
течением времени изменяются. В общем
случае её движение определяется
скалярными уравнениями: x=x(t);
y=y(t);
z=z(t).
Эти уравнения эквивалентны векторному
уравнению r=r(t)=rXi+rYj+rZk,
При движении
материальной точки её координаты с
течением времени изменяются. В общем
случае её движение определяется
скалярными уравнениями: x=x(t);
y=y(t);
z=z(t).
Эти уравнения эквивалентны векторному
уравнению r=r(t)=rXi+rYj+rZk,
|
|
|
|
где х, у, z – проекции радиус-вектора на оси координат; i, j, k – единичные векторы (орты), направленные по соответствующим осям.
Радиус-вектор — вектор, задающий положения точки в пространстве относительно некоторой заранее фиксированной точки, называемой началом координат.
Для произвольной точки в пространстве, радиус-вектор — это вектор, идущий из начала координат в эту точку.
Длина радиус-вектора, или его модуль, определяет расстояние, на котором точка находится от начала координат, а стрелка указывает направление на эту точку пространства.