

1.2.4 Датчики расхода жидкостей и газов
Расходом сред называется количество вещества проходящее через попе- речное сечение трубопровода за определённый интервал времени.
Qm Q , где Q объёмный расход, Qm массовый расход . Данные измерения Q осуществляют расходомерами.
1 - Расходомеры переменного перепада давлений, основаны на дросселировании потока вещества через су-
жающие устройства создающие перепад давлений.
2 - Расходомеры постоянного перепада давлений, основаны на дросселировании потока через сужающие устройства создающие перепад давлений.
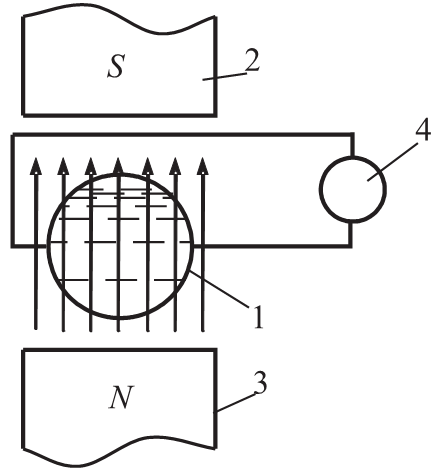
3 - Электромагнитные расходомеры на поведении в потоке под действием магнитного поля индукционной ЭДС, пропорциональной величине расхода потока.
4 - Вихревые – измерение потерь давления в потоке за счет вихреобразо- вания создаваемого неудобно обтекаемым телом, установленным на пути пото- ка.
5 - Акустические, основаны на измерении времени прохождения импуль- сов, создаваемых акустическими генераторами.
1.2.4 Б) Расходомеры постоянного перепада давления
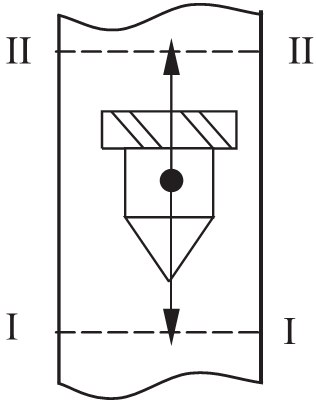
Наиболее распространенными приборами являются ротаметры. Шкала ротаметров практически равномерная, ими можно измерять небольшие расхо- ды, потери давления у них небольшие и не зависят от расхода.
Проходя через ротаметр с низа вверх, жидкость или газ подымает попла- вок пока, кольцевая щель между поплавком и стенками конусной трубки не достигнет значения, при котором силы, которые действуют на поплавок, урав- новесятся и он остановится на том значении какой расход.
На поплавок ротаметра действует осевая сила, которая направлена в про- тивоположную сторону.
Сверху вниз действуют:
1 - сила тяжести
VП П g , где
VП - объем поплавка;
П – плотность ма-
териала поплавка; g – ускорение силы тяжести.
2 - сила от давления жидкости (газа) на верхнюю плоскость поплавка
2
2
' – среднее давление жид. на единицу верхней плоскости поплавка;
S – площадь наибольшего поперечного сечения поплавка.
Снизу вверх на поверхность поплавка действуют тоже силы:
1 - сила от давления жидкости (газа) на нижнюю поверхность поплавка
1
к
б
K н S , где K - коэффици-
ент сопротивления, который зависит от критерия Рейнольдса и степени шеро-
ховатости поверхности поплавка; к
- средняя скорость жид.(газа) в кольцевом
канале; S б
- боковая поверхность поплавка; n –показатель степени, который за-
висит от скорости жидкости (газа).
Поплавок уравновешен когда:
' н '
или
VП П g 2 S K к S б 1 S
n
' '
VП П g K k S б
1
Когда допустить, что
2 S
к при всех расходах остается постоянной, то пра-
вая часть уравнения будет постоянной т.к. остальные величины являются для данного прибора постоянными. Т.о. разность давлений на поплавок
const . Это значит, что ротаметр является
1 2
прибором постоянного перепада давления.
Если сложить уравнение Бернули для сече- ний I-I и II-II и уравнение неразрывности потока, то получим уравнение расхода:
Q a S k
2 g VП ( П ) , м3/с

S
S
где S k
- площадь кольцевого отверстия.
Т.к. значение под корнем можно считать по- стоянным, то:
Q a S k k
Эта зависимость линейная, следовательно шкала ротаметра будет равно- мерной.
Ротаметры делают со стеклянной трубки при этом он работает до давле- ния 0,58 Па, для большего давления их делают с металла. Эти ротаметры дела- ют с электрической и пневматической дистанцией управления.