

1.2.2 Б) Основные сведения о выборе, установке и эксплуатации при- боров давления(пд)
Для надежного измерения давления необходимо соблюдение требование:
1) При выборе ПД нужны сведения о величине давления, диапазоне, наличие пульсаций, свойства среды, заданная точность измерения; 2) При измерении давления газов в трубах отбор импульса производится выше оси трубопровода, жидкости ниже оси трубопровода; 3) Места отбора давления должно распола- гаться вдали от поворотов ответвлений, местных сопротивлений - т.к. искаже- ние формы потока. 4) соединение отборных устройств и датчиков производят с
помощью импульсных трубок диаметр 10-12 мм из алюминия, меди. стали -
раздел
сосуды.
лительные
А Б
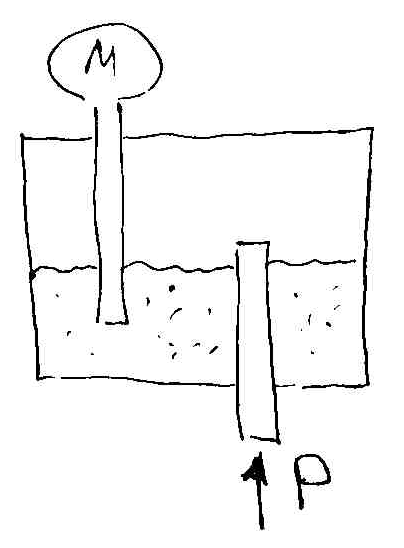
А) 1 – корпус; 2 – мембрана; М - манометр; над мембраной вода, с агрес- сивной средой контактирует мембрана из антикоррозионных покрытий.
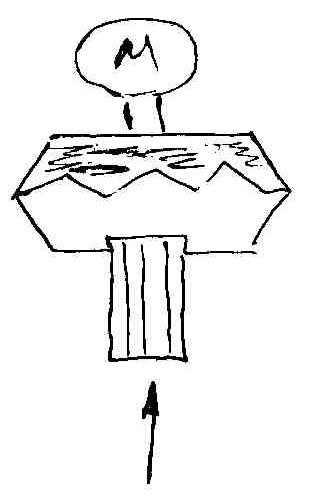
Б) корпус заполнен жидкостью не реагирующей с контактной средой.
6) пульсации потока вызывают колебание стрелки, чтобы этого избежать ставят сглаживающее устройство в виде игольчатого вентиля-трубки неболь- шой длины с малым внутренним диаметром, который создает сопротивление потока сглаживая колебания.
1.2.3 Датчики уровня жидкости
Подразделяются на:
- непрерывного действия, которые непрерывно измеряют уровень.
- прерывистого действия (дискретного действия), сигнализируют наличие уровня(сигнализаторы уровня).
По принципу действия: поплавковые, гидростатические, радиоизотопные, электрические, акустические
1.2.3 А) Поплавковые уровнемеры
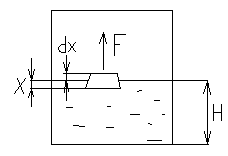
H
F g S ( x)dx
0
Выравнивающая сила собственный вес поплавка G=F.
Принимаем, что S=const, тогда
x G g S
const
Схема поплавкового уровнемера с электронным дифференциальным трансформаторным преобразователем.

Схема буйкового уровнемера с пневматическим преобразователем.
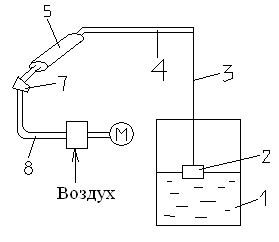
На конце заслонки есть сопло, которое образует пнев- моконтакт, т.е. давление зависит от взаимного расположе- ния сопла и заслонки и данная величина давления измеряет- ся манометром М.
При изменении уровня изменяется выталкивающая сила, действующая на поплавок, изменение его положения и перемещение через трос преобразуется посредством вала 4, где наматывается трос 3, поворотом торсионной трубки 5 и связанного с ней вала 6 и заслонки 7. Это приводит к изменению давления воз- духа в пневмоустройстве 8. Оно пропорционально измеряемому уровню.