

2.4.3 В) Изодромные регуляторы (пи-регул-ры)
Изодрома - равноубывающий (от греч.). Закон регулирования включает пропорциональные и интегральные составляющие μ = kp (∆φ+1/Tи∫∆φ)dt
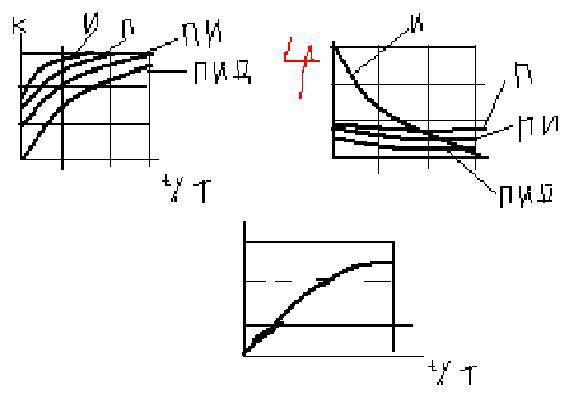
Tи – время изодрома, время, за которое удваивается величина П - состав- ляющей данного регулятора. Диаграмма работы.
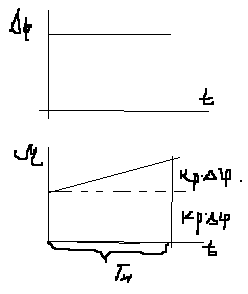
При появлении ∆φ на входе регулятора, мгно- венно срабатывает П – составляющая.
Регулирующий орган перемещается на Кобс*μ. Это регулирование со статическим регулированием. Далее вступает в работу интегральная составляющая. Интегральное воздействие изменяется с постоянной скоростью и при этом устраняется статическая ошиб- ка регулирования. Достоинства: хорошие статические и динамические свойства, устраняется статическая погрешность. Применяется для регулирования объек-
тов, подверженных частым незначительным возму- щениям.
2.4.3 Г) пд - регуляторы, пид - регуляторы
к р
t
( 1/ Т н
dt Td
d )
0 dt
Тд - время предворения +- бывают прямое и обратное
dφ∕dt - характеризует скорость изменения регулируемой величины.
Регулирующее воздействие данной заключается в предвидении на какую величину и в какую сторону изменится регулирующая величина Ф.
Диаграмма работы:
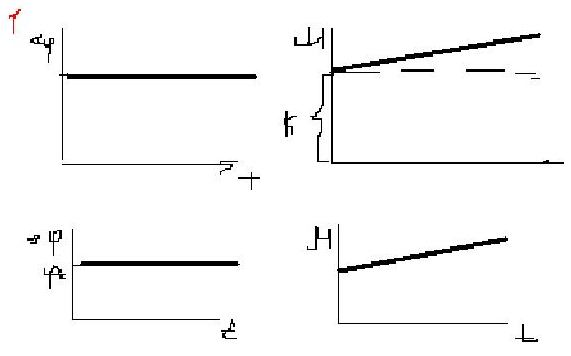
Если t=0 то μ→∞
t
t>0,
к р (
0
dt
Данный регулятор применяется для регулирования объектов чистого за- паздывания, а также подверженым чистым возмущениям.
2) Пропорциональный регулятор с предворением (ПИД)
к р
( Td
d )
dt
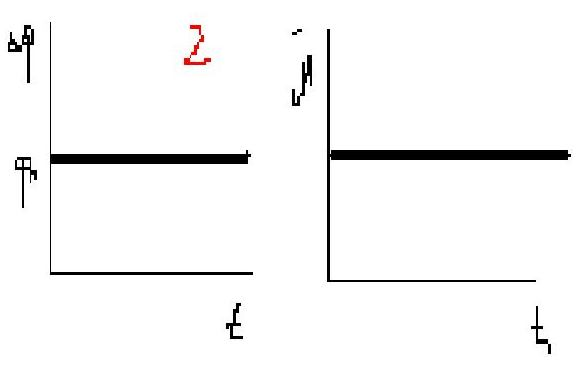
При t=0 срабатывает дифференциальная составляющая и μ ═ ∞
t>0,
к р
Динамические хорошие свойства применяются для регулирования объек- тов подачи, регулирование запаздывания.
1.Наличие статической ошибки свойственна ПИД регуляторам.
2.4.4 Основные показатели качества регулирования. Выбор типа ав- томатического регулятора
При синтезе АСР необходимо определить на сколько отклонится регули- руемая величина от своего заданного значения, и как скоро завершится пере- ходный процесс т.е. определить t.регулирования.
Для определения данных параметров служат параметры качества в АСР. Графики переходных процессов в АСР приведены ниже
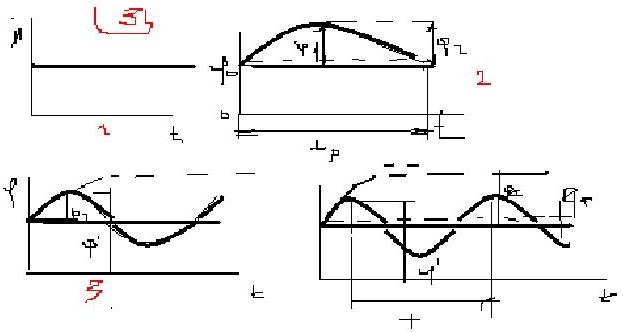
Рис.1 Изменение регулирующего воздействия на входе в объект
Рис.2 Изменение регулируемой величины в объекте. Пунктир при отклю- ченном регуляторе. Сплошная – переходной процесс в регуляторе, Ф0 - задан- ное значение регулируемой величины, Ф1- максимальные динамические откло- нения регулируемой величины, Фк - потенциальное отклонение регулируемой величины в объекте при оклоненном регуляторе, график экспоненциального переходного процесса.
Рис.3 График колебаний переходного процесса в АСР без остаточного от- клонения регулируемой величины. Переходный процесс носит колебательно - затухательный характер Ф возвращается в значение Ф0.
Рис.4 Переходной процесс АСР с остаточным отклонением регулируемой
величины.
Существует несколько методов расчета и выбора типа регулятора:
1.Аналитический
2.Графоаналитический
3.Эксперимент
В практике используется второй метод:
Исходными данными для решения данной задачи являются следующие.
В зависимости от объекта регулирования (τ,Т,Коб ), - max , - заданные па-
раметры качества переходного процесса в АСР ( Методика заключается в следующем:
1 , t p.задан , задан , ост.задан ).
1.По отклонению t/T определяют вид регулирования. Если t/T<0.2 , то принимается релейный регулятор.
Если t/T>0.2 , то принимают регулятор непрерывные действия.
2.Принимается заданный вид типового переходного процесса, т.е. в каче- стве типов применяют 2 вида.
2.1 апериодический (рис 2)
2.2 колебательный с 20% перерегулированием
Без регулятора
a
0
ост
a
 Т
a
Т
a
Т
Рис 2