

Курс лекций по дисциплине «Автоматика, автома- тизация и АСУТП» для студентов химико-
технологических специальностей
Автор доц. Кафедры АППиЭ Кобринец В.П.
Введение:
а). История развития и современное состояние автоматики
Автоматика – (от греческого слова автоматос) – самодвижущийся. Пер- вые сведения об автоматических устройствах появились во 2 в. н. э. В трудах Герона Александрийского, где описывались автоматы по открытию дверей храма, дозировки воды.
Промышленное внедрение автоматики связано с промышленным перево- ротом в Европе (регулятор уровня воды в котле паровой машины Ползунова, регулятор скорости паровой машины Уатта).
Основные этапы развития автоматики:
- появление электроавтоматики связано с изобретением Якби электродви- гателя постоянного тока, Шиллинга – электромагнитного реле, Доливо- Добровольского - асинхронного 3-х фазного двигателя.
- появление радиоэлектроники связано с открытием Яблочковым явления фотоэффекта и Поповым -радио.
- появление ЭВМ для управления технологическими процессами связано с трудами Н. Винера, который в 1946 г. опубликовал книгу «Кибернетика или контроль связи у животных и машин», в основу которой положена аналогия между процессами, происходящими в мозгу человека и в автоматическом уст- ройстве. Методы кибернетики включают теорию автоматического регулирова- ния, математического моделирования процессов и явлений, методы их оптими- зации применимы до настоящего времени.
Современный этап состояния автоматизации в области химической тех-
нологии включает:
-внедрение и эксплуатацию систем приборов, которые реализуют основ- ные функции автоматических систем.
-широкое внедрение микропроцессорных контроллеров, которые реали- зуют функции преобразователя сигнала в цифровые коды, логического управ- ления, которые легко адаптируется к изменению технологических процессов, т.к. является программируемыми устройствами.
-разработку и внедрение автоматических систем управления технологи- ческими процессами (АСУТП). Основой АСУТП является ЭВМ, который осу- ществляет сбор информации, ее обработку по соответствующим параметрам. Данная информация используется оператором для управления процессом, а также с помощью ЭВМ определяется оптимальный режим протекания химико- технологического процесса. Автоматизированный – это значит что в контуре есть оператор.
В настоящее время внедряются такие АСУТП, где используются инфор- мационный, управляющий режим (первый является предпочтительным).
б). Классификация автоматических систем
Механизация – замена ручного труда работой машин и механизмов. В
механизации процессами работы машин управляет человек.
Автоматизация – замена человеческой функции управления машинами, специальными техническими устройствами.
Совокупность технологического процесса с техническими средствами для его управления называется автоматизированной системой (АС).
По принципу действия и по назначению АС подразделяются на следую- щие типы:
- Дистанционное управление – со сравнительно небольшого расстояния (в пределах видимости). Например, управление конвейером. В условиях частич- ной автоматизации этот метод является основным. В условиях полной автома- тизации - дублирующий. Как правило, все АС дублируются ручным управлени- ем, и оно включается при отказе основной системы.
- Телеуправление – управление со сравнительно большого расстояния. При этом по 1 каналу связи нужно передать большое число команд из пульта
управления на объект управления. На пульте применяется специальное кодиро- вочное устройство, а на пульте- расшифровывающее устройство. Пример: на- сосная станция, тепловой пункт.
Автоматическое управление – управление с помощью технических средств без участия человека.
Схема соединения основных элементов данной автоматической системы приведена рисунке
ОУ ИУ УУ КС
ОУ - объект управления
ИУ - исполнительное устройство УУ - управляющее устройство КС - командный сигнал
КС в УУ преобразуется в управляющее воздействие, которое поступает в
ИУ. Данное устройство воздействует на объект, изменяя режим его работы в соответствии с величиной КС.
Автоматический контроль – предназначен для автоматического измере- ния параметров процессов и аппаратов, для учета энергоресурсов и т.д.
Схема соединения элементов данной системы приведена на рисунке
ОУ Д ВП
Д - датчик
ВП - вторичный прибор
Датчики воспринимают текущее значение технологического параметра и преобразовывает его в сигнал, удобный для дальнейшей его передачи и усиле- ния. Данный сигнал от Д поступает в ВП, в которой на диаграмме отражается величина данного технологического параметра. Шкала ВП градуируется в еди- ницах измеряемого параметра.
Автоматическое регулирование – обеспечивает поддержание на заданном уровне какого-либо параметра без участия человека и с помощью устройств ав- томатического регулятора.
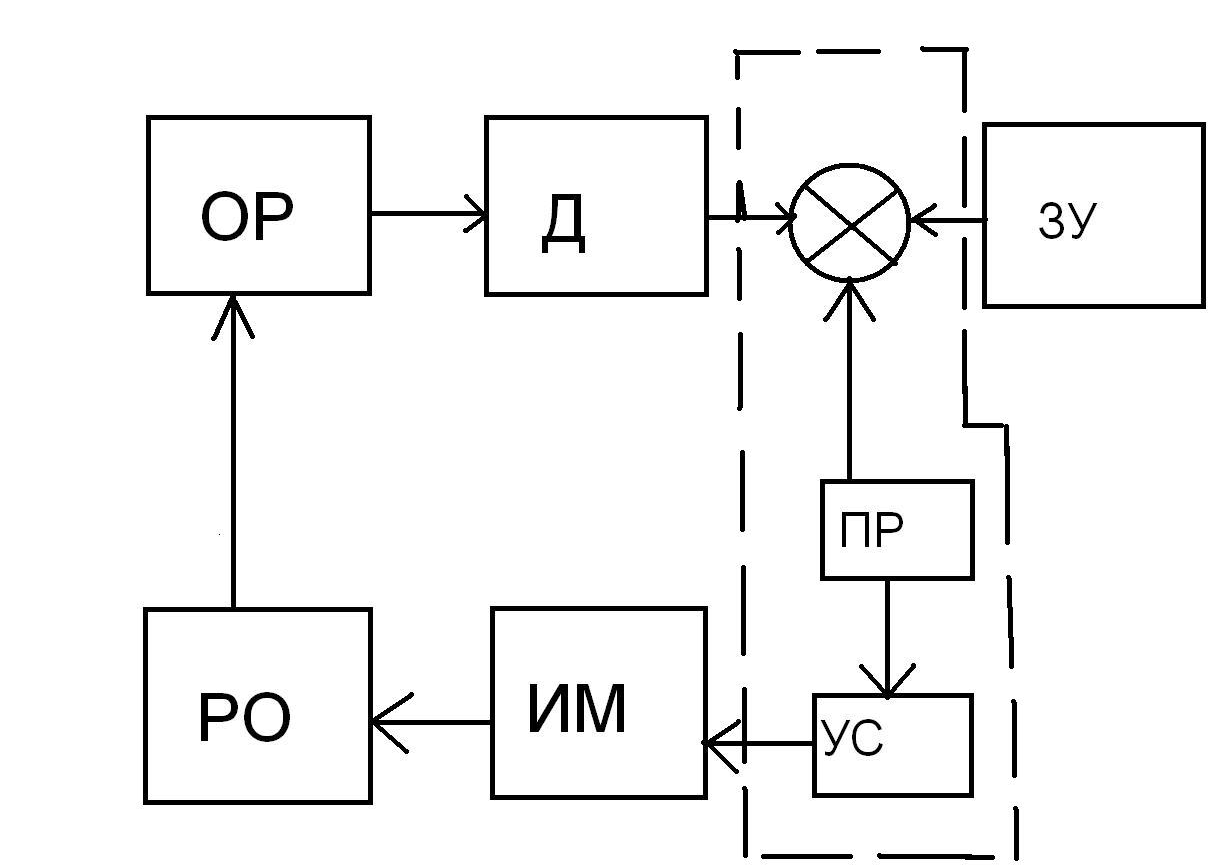
СУ - сравнивающее устройство
ЗУ - задающее устройство
ПР - преобразователь
УС - усилитель
УМ - исполнительный механизм
РО - регулирующий орган
Д воспринимает величину технологического параметра и преобразовыва- ет ее в электрический сигнал т соответствующий значению данного параметра.
ЗУ формирует электрический сигнал з
пропорционально заданному значению
технологического параметра в ОФ. Оба сигнала сравниваются в СУ и на выходе
формируется сигнал
равный разности сигналов
з
т
- рассогласование или ошибка регулирования.
Она возникает, когда текущее значение параметра отличается от заданно- го его значения, согласно технологическому регламенту.
Цель работы данной системы - устранить
, чтобы в ОР поддержива-
лось заданное значение параметра.
преобразовывается в ПР по заданному
закону регулирования, усиливается в УС и на выходе регулятора формируется
регулируемое воздействие М функции от величины
.
Сигнал пропорциональный М поступает в ИМ, который жестко связан
РО. Данный РО приводится в движение ИМ и изменяемый сигнал поступает в
ОР. Следовательно, изменяется значение регулирующей величины т
изменяться до тех пор пока т = з .
и будет
Технологическая сигнализация подразделяется на следующие виды:
- аварийная – для извещении об аварии на объекте. Выполняется звуковой и световой сигнал. Звук вначале в виде сирены, далее свет указывающий
на конкретный аппарат.
- контрольная - извещает о состоянии объекта.
-предупредительная - предназначена для извещении персонала об пере- ключении оборудования
Автоматическая защита применяется для отключения оборудования, на- ходящегося в аварийной ситуации (защита от короткого замыкания).
Автоматическая блокировка - делится на 2 вида.
-аварийная - служит для отключения аппаратов, находящихся в техноло- гической цепи до аппаратов, находящихся в аварийной ситуации.
-запретно-разрешающая - предназначена для реализации сложных циклов оборудования по заданным режимам и не допускает вкл/откл персоналом само- стоятельно отдельных аппаратов, работающих по сложному циклу
1.Элементы автоматических устройств.
1.1 Функции и характеристики элементов автоматических устройств.
Каждая АС состоит из отдельных элементов, выполняющих определен- ную функцию. Каждый элемент воспринимает сигнал, поступающий от преды- дущих элементов осуществляют количественное и качественное преобразова- ние сигнала и передает его другому, т.е. каждый элемент является преобразова- телем некоторого входного сигнала У в выходной сигнал Х.
Схема данного элемента имеет следующий вид:
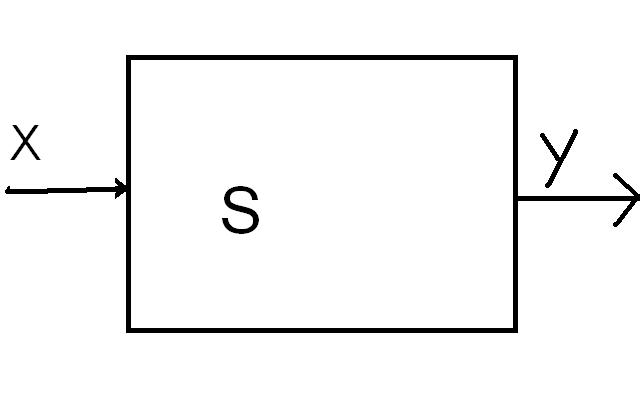
термометр сопротивления, термопара и др.
Существуют элементы, на которые подается сигнал от дополнительных источников Е. Схема элементов имеет следующий вид.
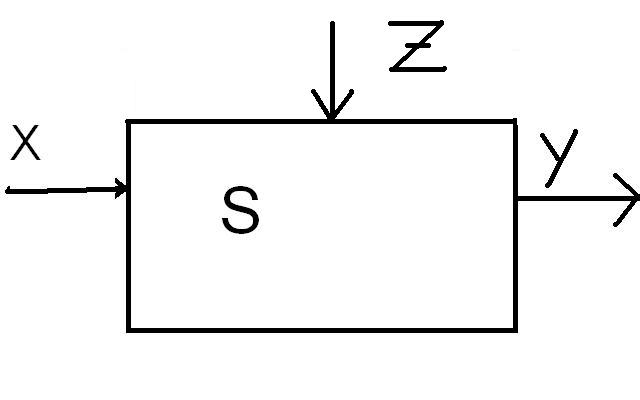
Пример: усилители, реле и т.д.
По назначению все элементы автоматический устройств делятся на сле- дующие виды:
- датчики
- реле
- усилители
- исполнительные механизмы
- автоматические регуляторы
- регулирующие органы (вентили, краны)
- элементы дистанционных передач (электрические и пневмотические преобразователи)
Основными характеристиками каждого элемента являются величины входного сигнала Х и выходного сигнала У. Y/X - статический передаточный коэффициент (S)
S ' y - динамический передаточный коэффициент
x
S y x - относительный динамический передаточный коэффициент
x y
S и S '
называются по-разному: для датчиков это чувствительность, а для
усилителей – коэффициент усиления.
При работе каждого элемента возникает погрешность, которая заключа-
ется в отклонении фактического значения выходной величины Yф
от его рас-
четного значения
Y р . Эта погрешность связана с износом материала элемента, с
отклонением U питающей сети от номинального, а также с изменением усло- вий окружающей среды.
Различают следующие виды погрешности:
1. Абсолютная - это разность:
 y
y
y
y р yф
2. Относительная
100%
y р
 y
y
3. Относительная приведенная
ymax
100% - она называется еще и
класс точности прибора, как правило он указывается на шкалах всех приборов.
1.2 Датчики, основные показатели и характеристики.
Датчик - устройство, осуществляющее функцию преобразования физиче- ской величины одного рода в физическую величину другого рода, удобную для передачи другим элементам и на усиление.
Основные характеристики:
1. Статическая характеристика y=f(x)
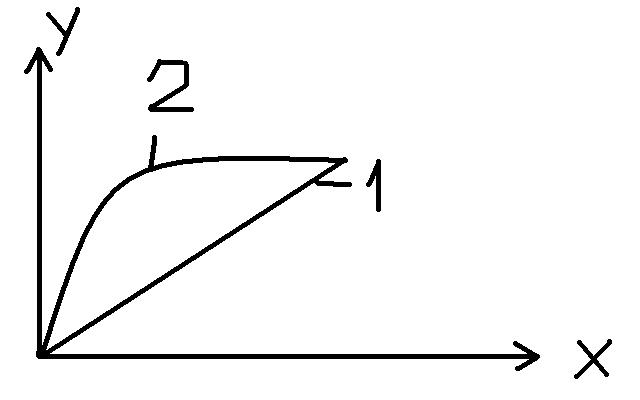
1 - линейная характеристика, поэтому чувствительность стоянной для всего диапазона х.
S y x
будет по-
2 - нелинейная, поэтому чувствительность будет различной и зависит от крутизны данной характеристики.
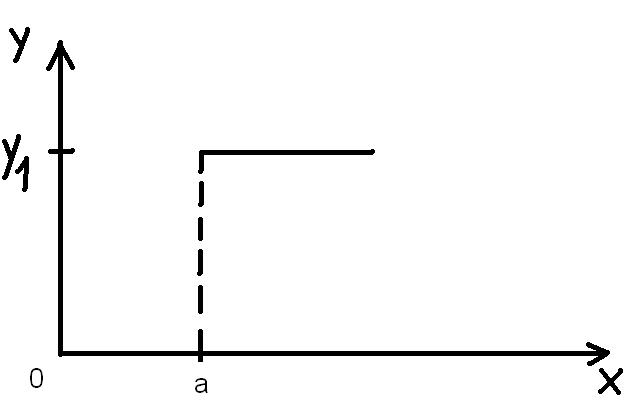
Датчики, статическая характеристика которого непрерывна называются датчиками непрерывного действия или функциональными. Если статическая
характеристика описывается следующей функцией
y k x , где k=const, то та-
кой датчик называется линейным. Если статическая характеристика датчика имеет разрывный характер вида y=0 при 0<x<a, y=y1 при x>a, то датчик называ- ется релейным.

2 - колебательный затухающий процесс.
По виду выходной величины сигнала у датчики делятся на:
- омические
- термоэлектрические
- емкостные
- индуктивные
- трансформаторные
По измеряемым технологическим параметрам:
- температуры
- давления
- расхода
- уровня
- плотности
- влажности и т.д.