

14.3. Примеры решения задач
Задача 14.3.1. К нижнему шкиву 3 подъемника (рис.14.1) приложен постоянный вращающий момент М. Определить ускорение груза 1 массы т1, поднимаемого вверх, если масса противовеса 2 равна т2, шкивы 3 н 4 массы т3 каждый представляют собой однородные цилиндры радиуса r. Массой ремня и трением в подшипниках шкивов пренебречь.
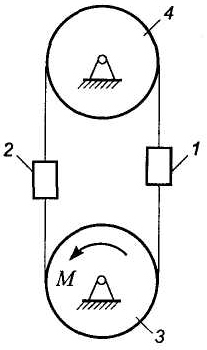
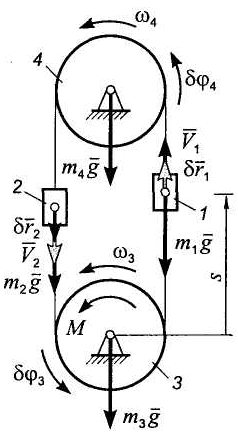
Рис. 14.1 Рис. 14.2
Решение. Система имеет одну степень свободы, если тела, входящие в систему, считать абсолютно твердыми, ремень нерастяжимым, а проскальзывание ремня на шкивах отсутствующим. При этих предположениях положение системы вполне определяется углом поворота ведущего шкива 3, который будем отсчитывать в направлении вращения шкива. Имея в виду цель задачи, примем за обобщенную координату перемещение s груза 1 (рис.14.2). Запишем уравнение Лагранжа
 .
(14.2)
.
(14.2)
Вычислим кинетическую энергию системы как сумму кинетических энергий тел, входящих в ее состав,
 .
.
Так как тела 1 и 2 движутся поступательно, а тела 3 и 4 совершают вращательное движение, то
 ,
,
где
 -
скорости груза и противовеса,
- угловые скорости шкивов,
-
скорости груза и противовеса,
- угловые скорости шкивов,
 - моменты инерции шкивов относительно
их осей вращения.
- моменты инерции шкивов относительно
их осей вращения.
Таким образом,
 .
(14.3)
.
(14.3)
Запишем выражение (14.3) в обобщенных координатах. Заметив, что
 ,
,
получаем после подстановки последних формул в (14.3):
 .
(14.4)
.
(14.4)
Таким образом, в рассматриваемом случае кинетическая энергия системы является функцией только обобщенной скорости.
Вычислим производные от кинетической энергии, входящие в уравнение (14.2):
 (14.5)
(14.5)
 ,
(14.6)
,
(14.6)
 .
(14.7)
.
(14.7)
Найдем обобщенную силу. Заметив, что связи, наложенные на систему, являются идеальными, вычислим сумму работ вращающего момента и сил тяжести на перемещении системы из положения, в котором обобщенная координата равна нулю, в произвольное положение с координатой s > 0:
Поскольку
 ,
то
,
то
откуда
 .
(14.8)
.
(14.8)
Подставляя формулы (14.5), (14.7) и (14.8) в уравнение (14.2), получаем дифференциальное уравнение движения системы
 ,
(14.9)
,
(14.9)
из которого находим ускорение груза
 .
.
Задача 14.3.2. Грузоподъемная установка (рис. 14.3) состоит из барабана 1 массой m1= 200 кг и радиусом r= 0,2 м, невесомого нерастяжимого троса, который перемещает груз 2 по наклонной плоскости, составляющий угол α = 30° с горизонтом. Масса груза т2 = 1000 кг, коэффициент трения между грузом и наклонной плоскостью f = 0,2. К барабану приложен вращающий момент М = 1,6 кНм. Определить величину ускорения груза а. Барабан считать однородным цилиндром.
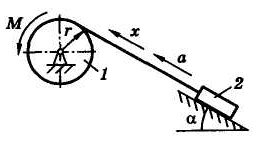
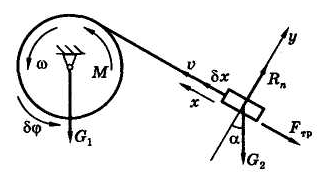
Рис. 14.3 Рис. 14.4
Решение. Рассматриваемая система имеет одну степень свободы (s = 1) и может быть описана одним уравнением Лагранжа второго рода

В
качестве обобщенной координаты выберем
координату х
груза на наклонной плоскости q
= x,
тогда обобщенная скорость
 будет
являться скоростью груза.
будет
являться скоростью груза.
Кинетическая энергия системы имеет вид
 ,
,
где ω — угловая скорость барабана; J — его момент инерции относительно оси вращения. Для однородного цилиндра

и, следовательно, J = 4 кгм2.
При учете кинематической связи v = ωr, т. е. кинетическая энергия запишется в виде
 .
.
где приведенная (к грузу) масса системы равна
 кг.
кг.
Вычислим производные, входящие в левую часть уравнения Лагранжа. Частная производная по обобщенной координате

так как кинетическая энергия явно от координаты х не зависит. Частная производная по обобщенной скорости
 .
.
Полная производная по времени
дает левую часть уравнения Лагранжа.
Входящую в правую часть уравнения обобщенную силу Q вычислим через возможную работу. Рассмотрим действующие в системе силы (рис. 14.4) и придадим телам системы возможное перемещение: бесконечно малое перемещение груза δх и поворот барабана на бесконечно малый угол δφ. Соотношение между этими величинами можно получить из уравнения кинематической связи v = ωr. Интегрируя обе части этого уравнения по времени, находим
 ,
,
или
 ,
,
где С — постоянная интегрирования.
Варьируя последнее соотношение, получаем равенство
 ,
,
которое в данном случае имеет простой геометрический смысл — равенство длины дуги окружности произведению радиуса на величину угла в радианах.
На возможном перемещении работу будут совершать сила трения
 ,
,
сила тяжести груза

и вращающий момент
 .
.
Таким образом, возможная работа для механической системы будет равна
 ,
,
где Fnp — приведенная сила системы.
Поскольку для системы с одной степенью свободы возможная работа записывается в виде δА = Qδq, и в нашей задаче δq = δx, сравнивая последние два соотношения, находим Q = Fnp, т. е. обобщенная сила является в данной постановке задачи приведенной силой
 .
.
Вычислим ее, учитывая, что
 .
.
Тогда
 .
.
Составляем теперь уравнение Лагранжа, приравнивая правую и левую части: тnpа = Fnp, откуда находим ускорение груза
 .
.
Задача 14.3.3. В планетарном механизме, расположенном в горизонтальной плоскости, колесо 1 неподвижно (рис. 14.5). К рукоятке О1О3 приложен постоянный вращающий момент М. Определить угловое ускорение рукоятки, считая колеса 2 и 3 однородными дисками с одинаковыми массами т и радиусами r. Массой рукоятки и сопротивлением пренебречь.
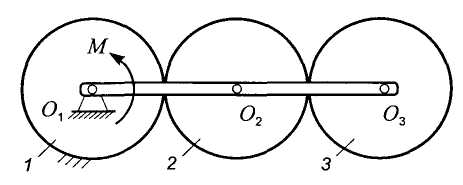
Рис. 14.5
Решение. Система имеет одну степень свободы. За обобщенную координату принимаем угол поворота рукоятки (рис. 14.6), тогда обобщенная скорость будет . Уравнение Лагранжа второго рода запишется в виде
. (14.10)
Кинетическая энергия системы равна сумме кинетических энергий колес 2 и 3:
 .
(14.11)
.
(14.11)
Предполагая, что колеса 2 и 3 совершают плоское движение, определяем их кинетические энергии по теореме Кёнига:
 .
(14.12)
.
(14.12)
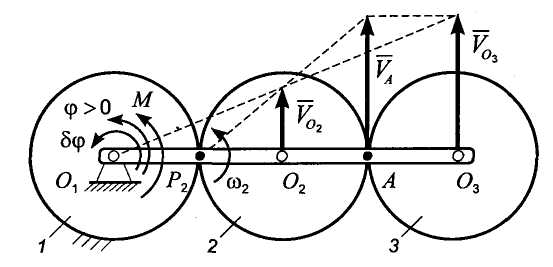
Рис. 14.6
Найдем скорости центров масс колес:
 .
(14.13)
.
(14.13)
Угловую
скорость колеса 2 определим с помощью
мгновенного центра скоростей этого
звена (точка
 ,
рис. 14.6):
,
рис. 14.6):
 .
(14.14)
.
(14.14)
Колесо
3 движется поступательно, так как скорости
его точек А
и
 равны, поэтому
равны, поэтому
 .
(14.15)
.
(14.15)
Моменты инерции колес
 .
(14.16)
.
(14.16)
Подставляя (14.12) в (14.11) с учетом (14.13)—(14.16), получаем кинетическую энергию системы как функцию обобщенной скорости
 .
(14.17)
.
(14.17)
Вычислим производные от кинетической энергии системы, входящие в уравнение (14.10):
 .
(14.18)
.
(14.18)
Для определения обобщенной силы
сообщаем рукоятке возможное перемещение
 и вычисляем сумму элементарных работ
активных сил на возможных перемещениях
точек их приложения. Так как связи,
наложенные на систему, являются
идеальными, а механизм расположен в
горизонтальной плоскости (поэтому
работа сил тяжести колес равна нулю),
то
и вычисляем сумму элементарных работ
активных сил на возможных перемещениях
точек их приложения. Так как связи,
наложенные на систему, являются
идеальными, а механизм расположен в
горизонтальной плоскости (поэтому
работа сил тяжести колес равна нулю),
то
 ,
,
откуда
 .
(14.19)
.
(14.19)
Подставив (14.18) и (14.19) в (14.10), получим дифференциальное уравнение движения механизма
 ,
,
из которого находим угловое ускорение рукоятки
 .
.