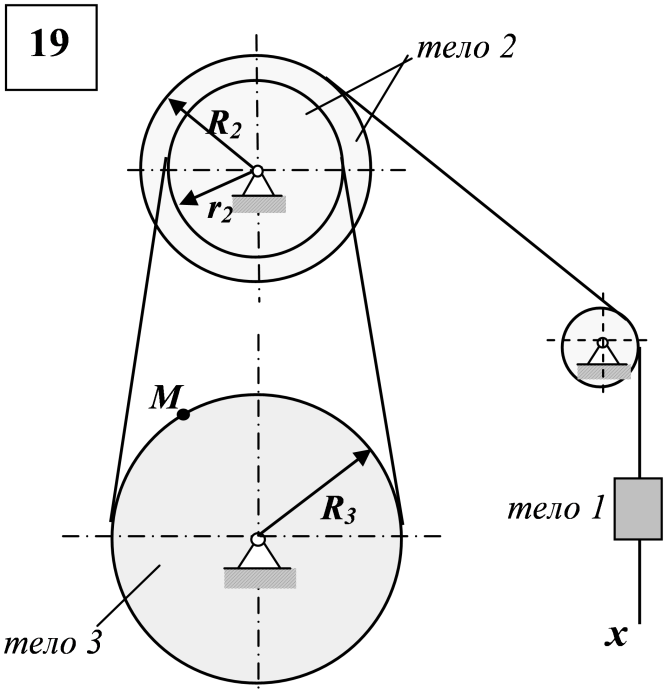
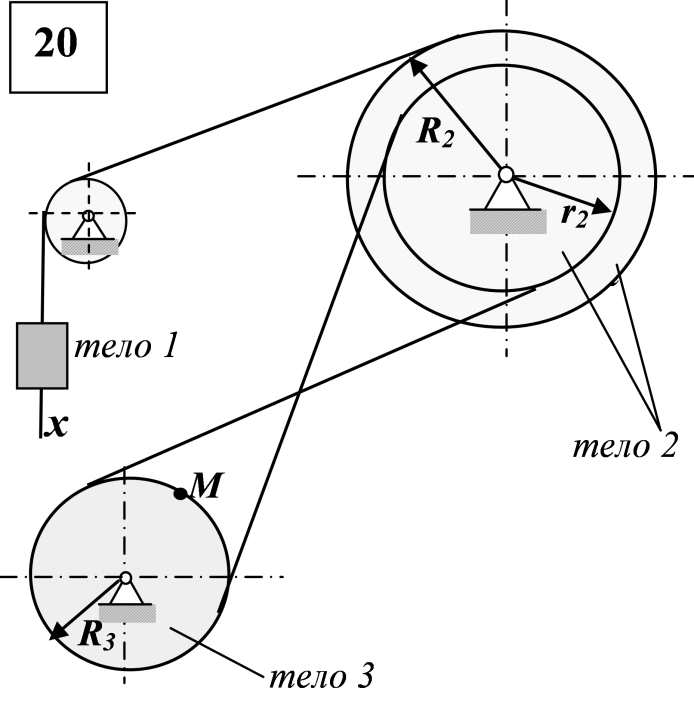
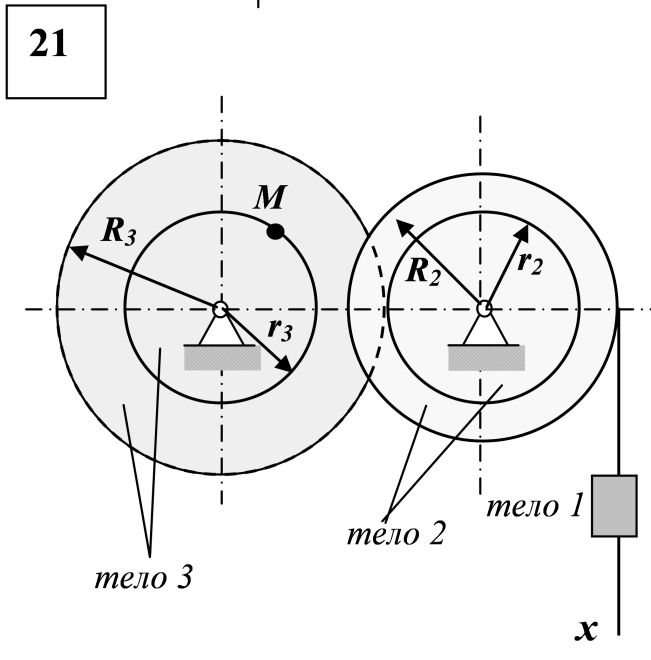
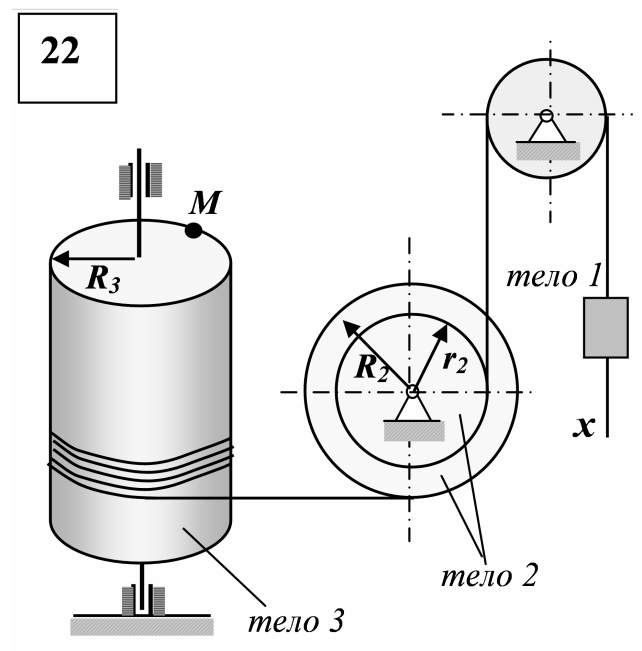
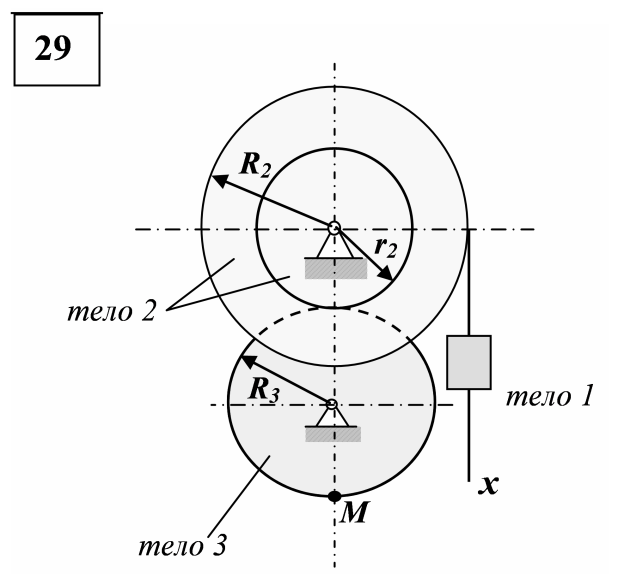
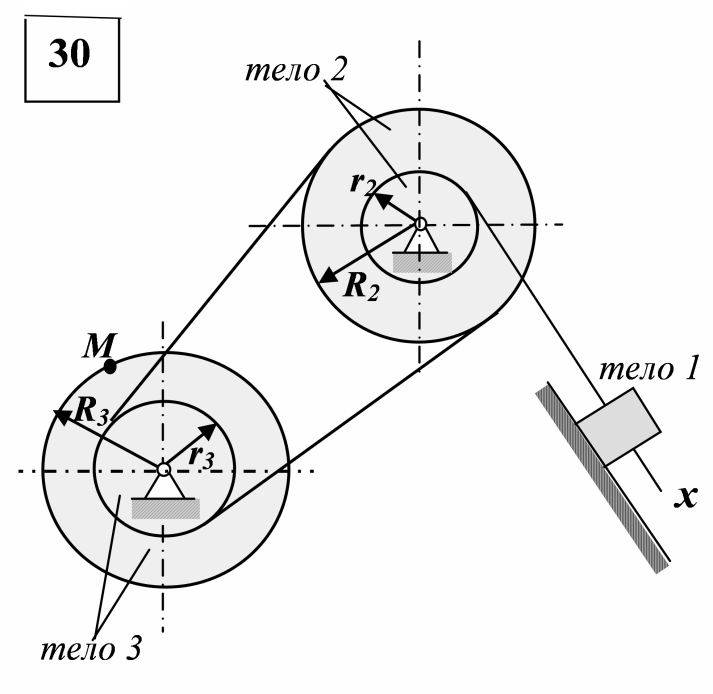
7.4.Задания к–2
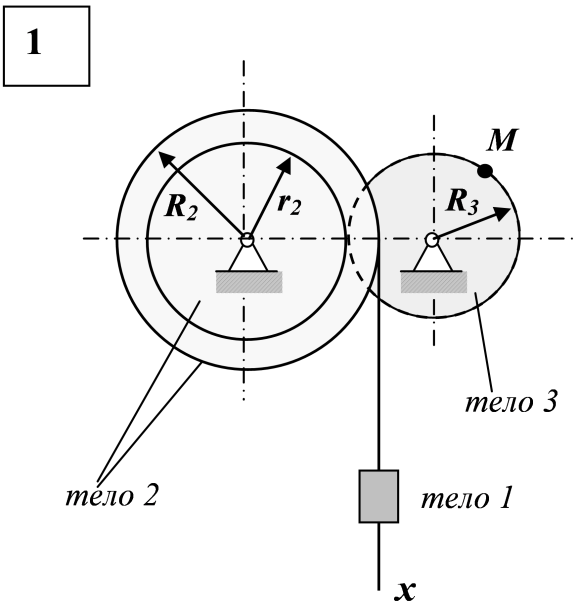
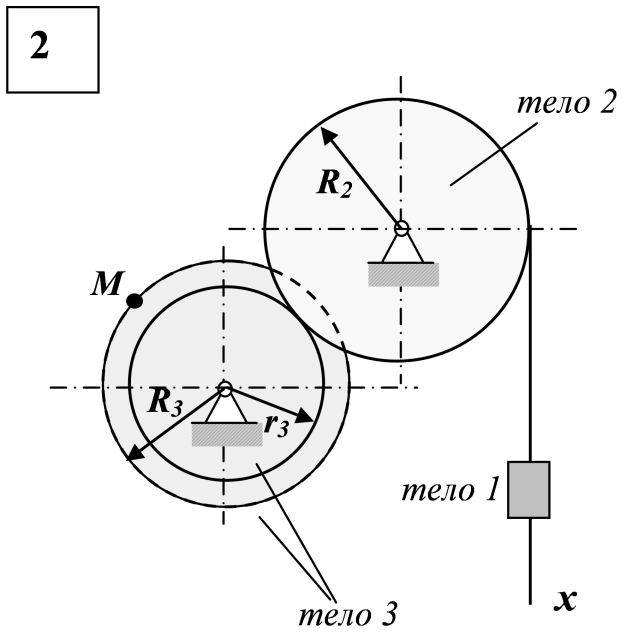
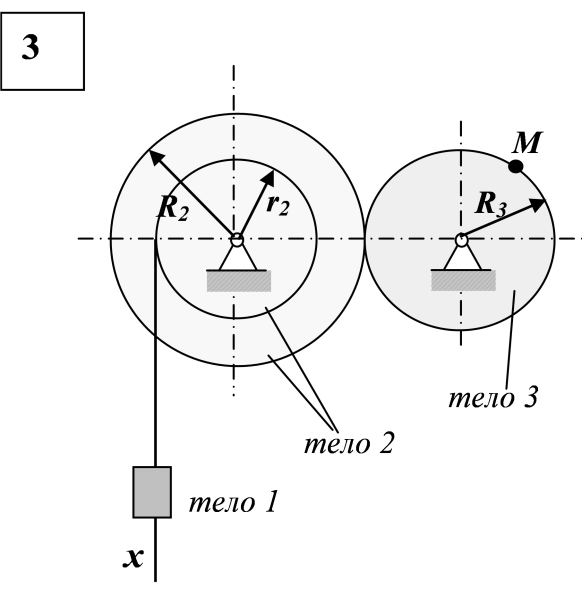
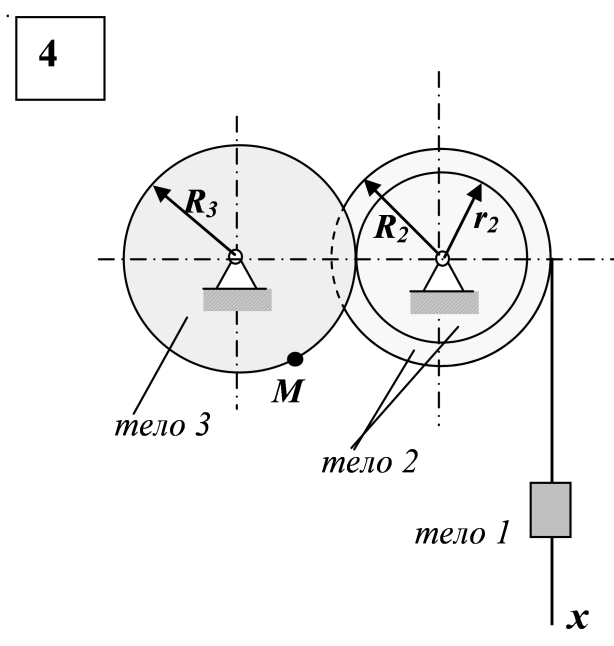
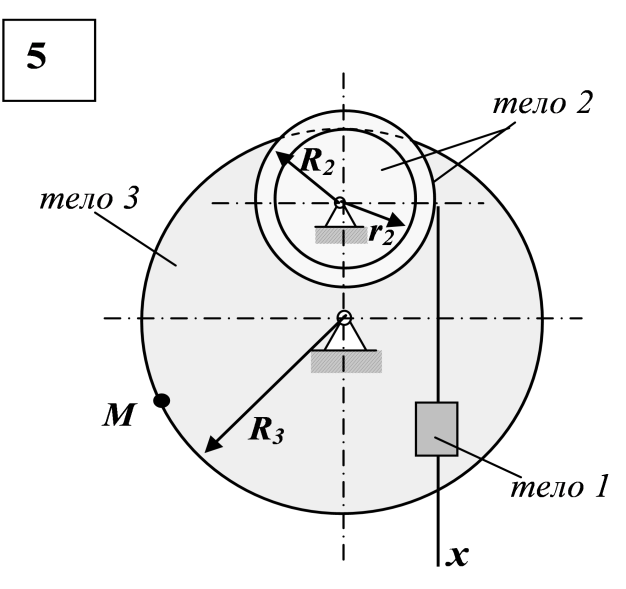
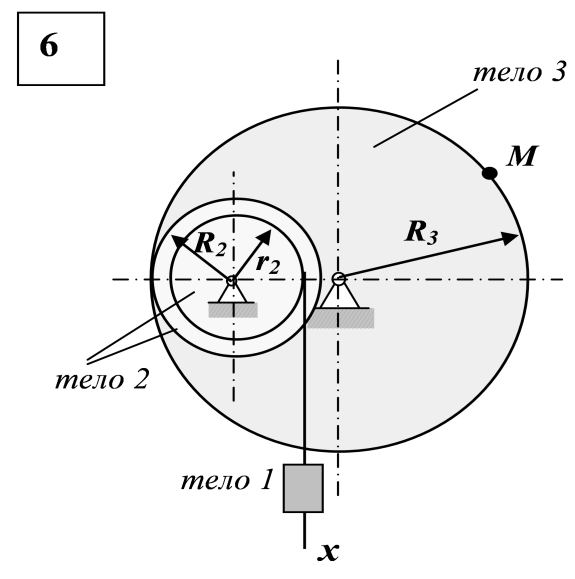
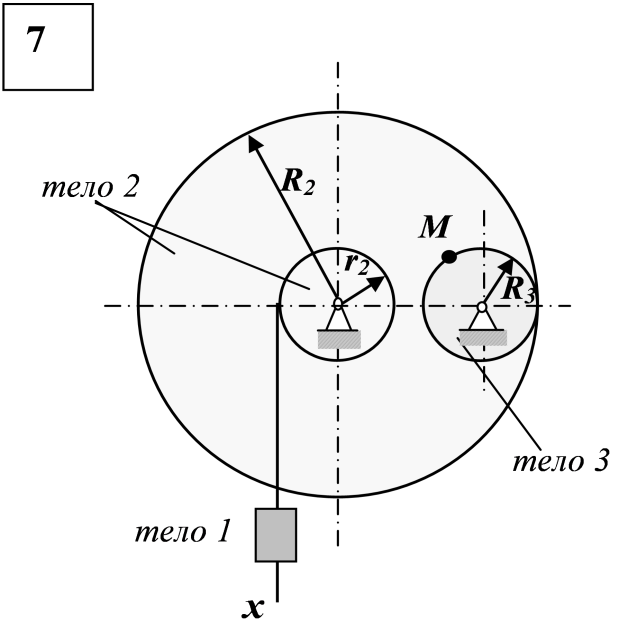
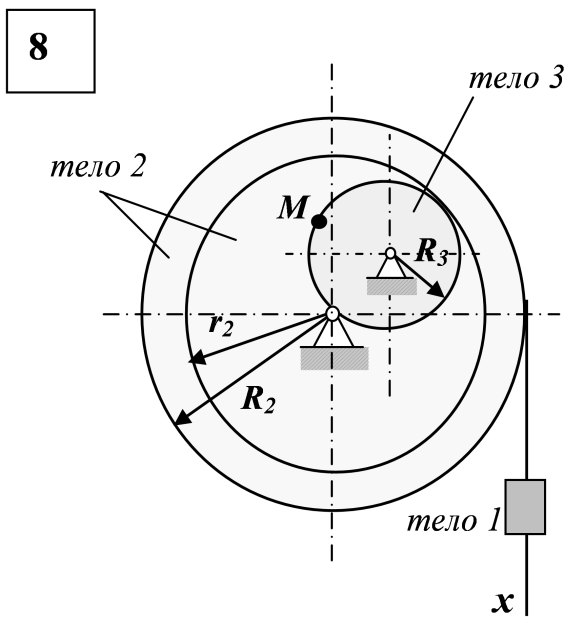
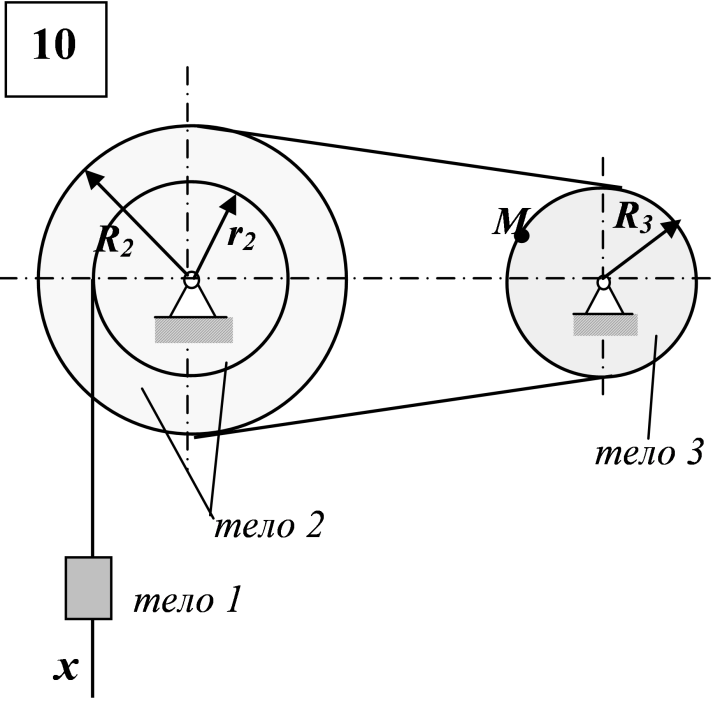
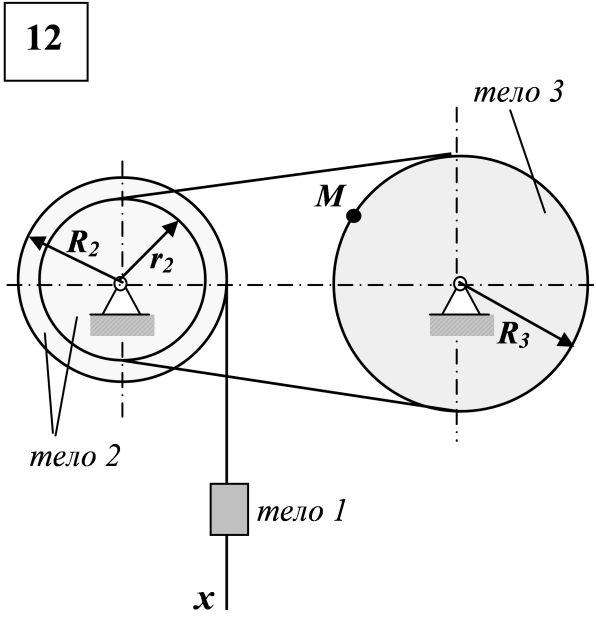
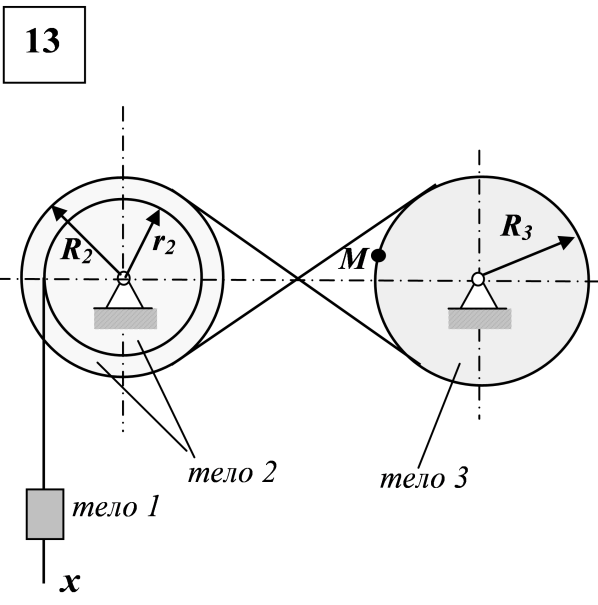
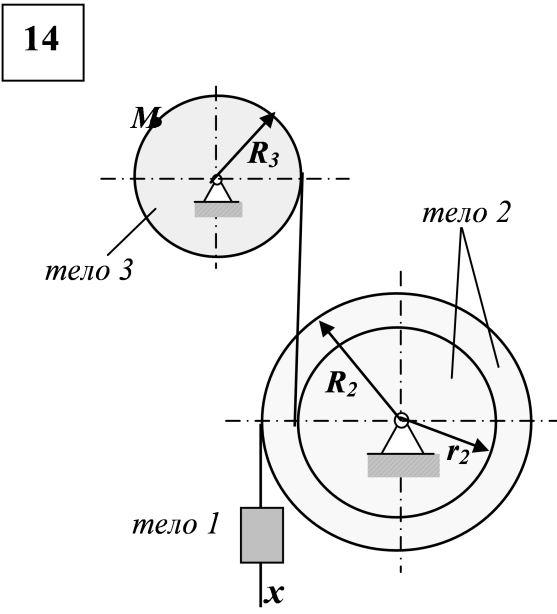
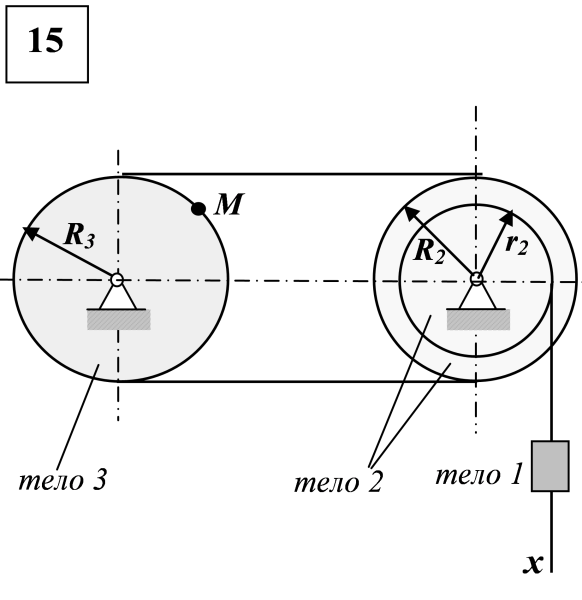
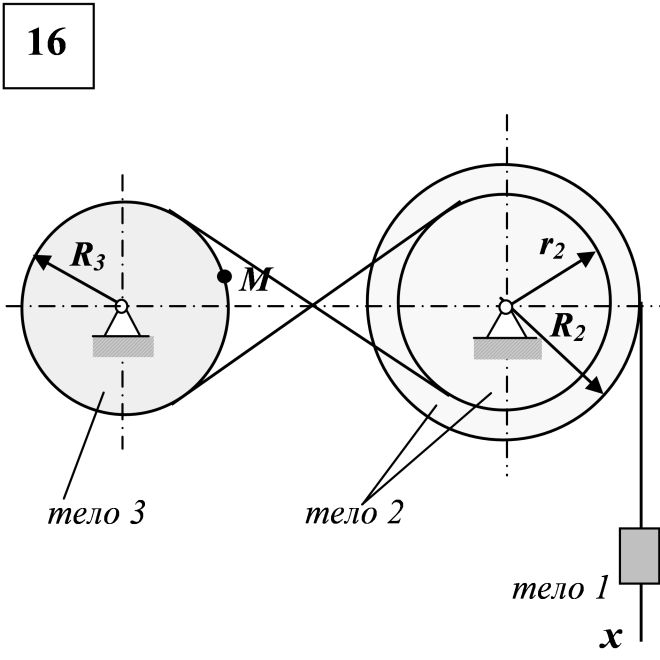
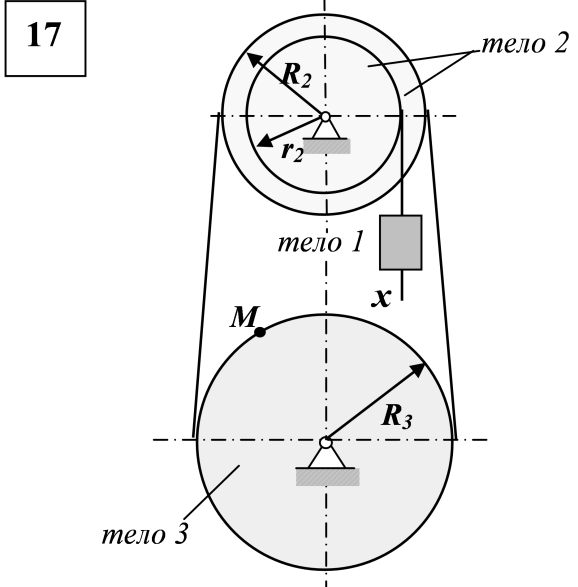
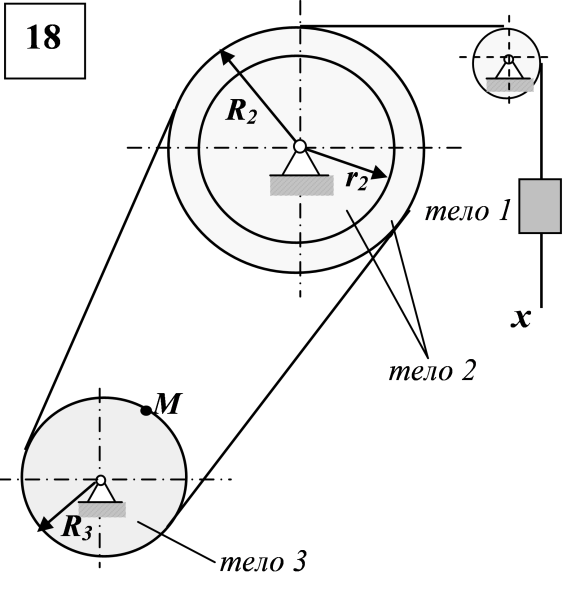
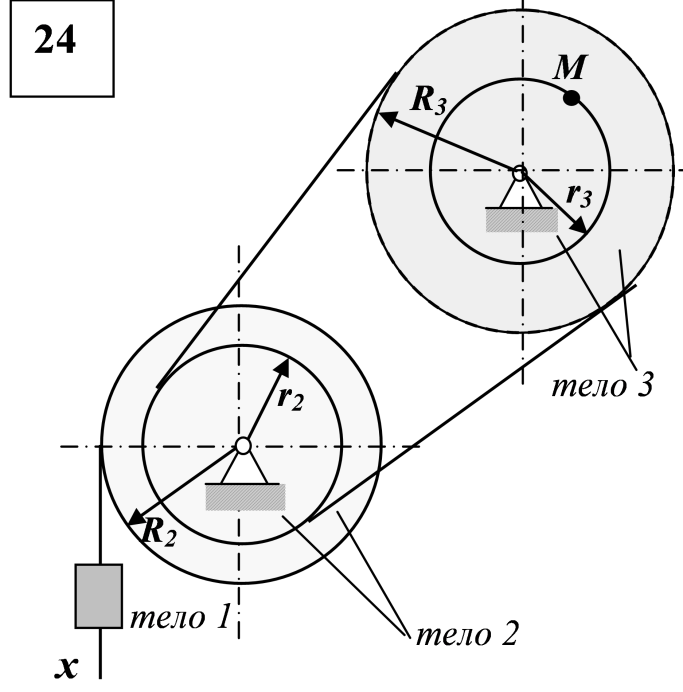
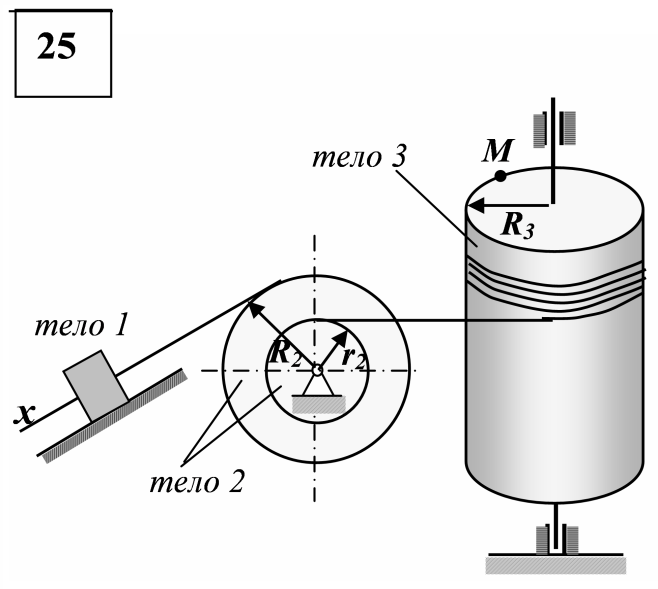
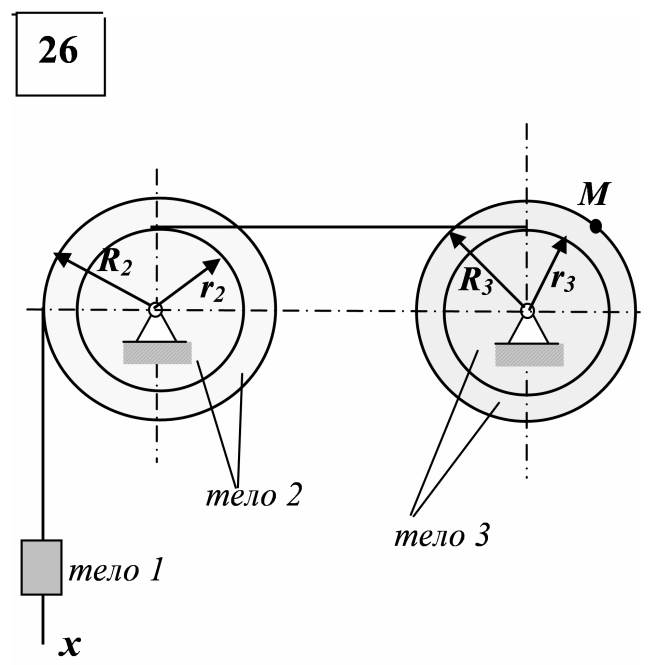
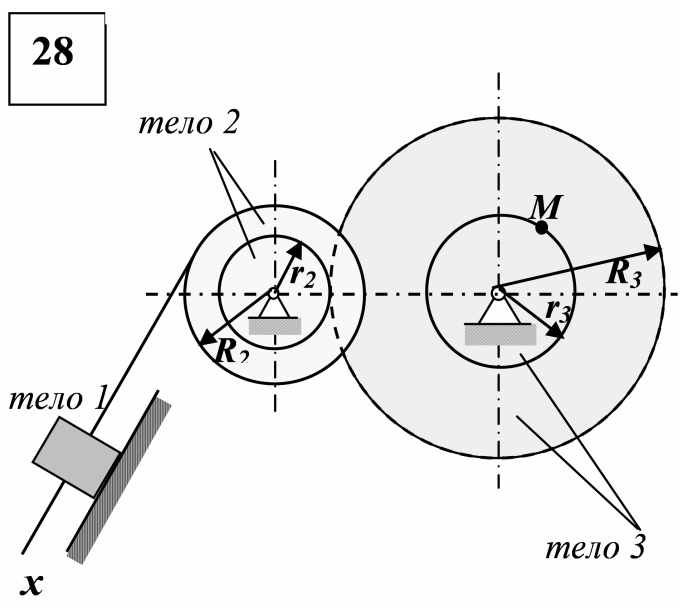
При задании уравнения движения x = f (t) груза (тела 1) и радиусам шкивов (тело 2 (R2, r2) и тело 3 (R3, r3)) определить: скорость и ускорение груза (тела 1) в любой момент времени t и в расчетный момент времени t1; скорость и ускорение точки М, принадлежащей телу 3, в любой момент времени t и в расчетный момент времени t1.
Исходные данные приведены в таблице 7.1: вариант задания; радиусы шкивов: тело 2 (R2 (см), r2 (см)) и тело 3 (R3 (см), r3 (см)); уравнения движения груза (тело 1) : x = f (t), (см); расчетный момент времени t1(с) для определения скорости и ускорения груза (тела 1) в момент времени t1, скорости и ускорения точки М, принадлежащей телу 3, в расчетный момент времени t1.
Таблица 7.1
Вариант задания
|
Радиусы шкивов |
Уравнения движения груза (тела 1) |
Расчетный момент времени t1, с
|
||||||||
тело 2 |
тело 3 |
x = f1 (t), см
|
|||||||||
R2 см |
r2 см |
R3 см |
r3 см |
|
|||||||
1 |
60 |
45 |
36 |
- |
y = 15t2 +12t + 2 |
2 |
|||||
2 |
80 |
- |
60 |
45 |
y = 4t2 +10t + 5 |
1 |
|||||
3 |
100 |
60 |
75 |
- |
y = 0,5t2 +6t + 5 |
2 |
|||||
4 |
58 |
45 |
60 |
- |
y = 9,5t2 +4t + 4 |
3 |
|||||
5 |
45 |
30 |
80 |
- |
y = 6t2 +15t + 3 |
2 |
|||||
6 |
45 |
35 |
105 |
- |
y = 6t2 +5t + 8 |
3 |
|||||
7 |
35 |
10 |
10 |
- |
y = 11t2 +2t + 6 |
2 |
|||||
8 |
40 |
30 |
15 |
- |
y = 6t2 +7t + 10 |
1 |
|||||
9 |
40 |
35 |
15 |
- |
y = 7t2 +3t + 5 |
3 |
|||||
10 |
40 |
25 |
20 |
- |
y = 10t2 +8t + 9 |
1 |
|||||
11 |
20 |
15 |
10 |
- |
y = 16t2 +10t + 5 |
2 |
|||||
12 |
30 |
20 |
40 |
- |
y = 22t2 +7 |
2 |
|||||
13 |
15 |
10 |
15 |
- |
y = 17t2 +3t + 6 |
1 |
|||||
14 |
60 |
50 |
20 |
- |
y = 13t2 +5t + 6 |
2 |
|||||
15 |
15 |
10 |
15 |
- |
y = 11t2 +2t + 5 |
2 |
|||||
16 |
20 |
15 |
15 |
- |
y = 12t2 +6t + 4 |
3 |
|||||
17 |
15 |
10 |
20 |
- |
y = 7t2 +4t + 8 |
1 |
|||||
18 |
20 |
15 |
10 |
- |
y = 10t2 +12t + 3 |
1 |
|||||
19 |
15 |
10 |
20 |
- |
y = 18t2 +10t + 5 |
3 |
|||||
20 |
25 |
15 |
10 |
- |
y = 27t2 +8t + 10 |
1 |
|||||
21 |
20 |
10 |
30 |
10 |
y = 13t2 +5t + 6 |
2 |
|||||
22 |
40 |
20 |
35 |
- |
y = 21t2 +6t + 7 |
1 |
|||||
23 |
40 |
30 |
30 |
15 |
y = 18t2 +9t + 5 |
2 |
|||||
24 |
30 |
15 |
40 |
20 |
y = 4t2 +8t + 9 |
2 |
|||||
25 |
50 |
20 |
60 |
- |
y = 11t2 +4t + 8 |
2 |
|||||
26 |
32 |
16 |
32 |
16 |
y = 50t2 +14t + 6 |
2 |
|||||
27 |
40 |
18 |
40 |
18 |
y = 42t2 +10t + 5 |
1 |
|||||
28 |
20 |
10 |
40 |
15 |
y = 36t2 +5t + 8 |
2 |
|||||
29 |
50 |
20 |
30 |
- |
y = 4t2 +6t + 4 |
1 |
|||||
30 |
30 |
15 |
30 |
10 |
y = 16t2 +5t + 6 |
3 |
|||||