

Задача 7. Применение теоремы об изменении кинетической энергии к исследованию движения механической системы
Каток для раскатывания асфальта (рис. 1) состоит из кузова массой т1 = 3∙103 кг и двух одинаковых барабанов. Масса барабана m2=103 кг, радиус его r=0,5м, а радиус инерции ρ=0,4м. Коэффициент трения качения барабанов fк=9 см. Определить скорость кузова катка после того, как он проехал расстояние S=2 м, начальная скорость катка была равна 0,2 м/с. К ведущему барабану приложен постоянный момент M=4,6 кНм.
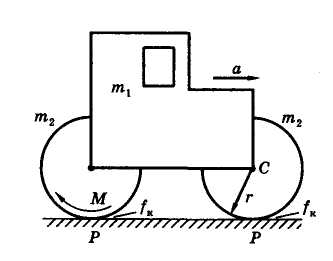
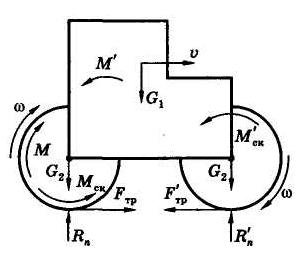
Рис. 1 Рис. 2
Решение. Так как в задаче идет речь о конечном перемещении системы, то следует применить теорему об изменении кинетической энергии в интегральной (конечной) форме:
![]() .
.
Кинетическая энергия системы (поступательно движущийся кузов и совершающие плоское движение барабаны) имеет вид
![]() ,
,
где v — скорость кузова, vС — скорость центра масс барабана, ω — его угловая скорость, JzC = m2ρ2 = 160 кгм2 — момент инерции барабана относительно его оси (проходящей через центр масс).
Кинематические связи определяются тем, что каждый барабан поворачивается вокруг своего мгновенного центра скоростей (точки Р), а именно: vC = ωr; кроме того, v = vC, т. е. ω = v/r. Тогда кинетическая энергия приводится к виду
![]() ,
,
где тпр= 6280 кг — приведенная к кузову масса системы. Начальная кинетическая энергия системы
 Дж.
Дж.
Вычислим теперь величину работы действующих сил (рис. 2).
Внешние
силы. Силы
тяжести барабанов G2
и кузова G1
работы не совершают, поскольку они
перпендикулярны скоростям (и,
соответственно, перемещениям) точек их
приложения. Также не работают нормальные
реакции Rn
и R’n
и силы трения Frp
и
![]() ,
так как всегда равны нулю скорости их
точек приложения — мгновенных центров
скоростей, и, соответственно, постоянно
равны нулю их мощности.
,
так как всегда равны нулю скорости их
точек приложения — мгновенных центров
скоростей, и, соответственно, постоянно
равны нулю их мощности.
Работу будут совершать моменты сопротивления качению:
![]() и
и
![]() ,
,
а именно:
![]() ,
,
где
![]() .
.
Здесь φ — угол поворота барабанов, для которого, интегрируя уравнение кинематической связи ω = v/r с учетом нулевых начальных условий для перемещений s и φ, легко получаем φ = s/r. Тогда
![]()
Внутренние силы. Запишем, учитывая, что кузов не вращается, суммарную работу внутренних сил (моментов) М и М’:
![]() .
.
Тогда сумма работ всех сил запишется в виде
![]() .
.
Множитель, стоящий в этой формуле перед перемещением s, — это приведенная сила системы
![]()
Итак
![]() Дж.
Дж.
Собирая правую и левую части теоремы, получаем
![]()
или Т – 125,6 = 760, откуда
![]() и
и
![]()
Ответ: v = 0,53 м/с.
Применение общего уравнения динамики к исследованию движения механической системы
Задача
8.
Для заданной механической системы
определить ускорение груза 1 и натяжение
в ветви нити 1, к которой прикреплен
груз. Массами нитей пренебречь. Система
движется из состояния покоя. Считать,
что
![]() ,
,
![]() ,
,
![]() ,
,
![]() ,
,
![]() см,
см,
![]() ,
f=
0,1 (рис. 1).
,
f=
0,1 (рис. 1).
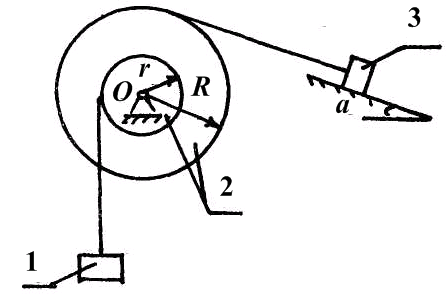
Рис 1
Решение.
1.
Составление расчетной схемы.
На механическую систему действуют
активные силы
![]() ,
,
![]() ,
,
![]() .
Применяя принцип освобождаемости от
связей к внешним связям, покажем
.
Применяя принцип освобождаемости от
связей к внешним связям, покажем
![]() ,
,
![]() ,
N. Силу трения
,
N. Силу трения
![]() изобразим в сторону, противоположную
предполагаемую направлению движения.
изобразим в сторону, противоположную
предполагаемую направлению движения.

Рис. 2
Так как система пришла в движение из состояния покоя, то ускорения точек системы 1 направлены в сторону движения.
Приложим силы инерции. Тела 1 и 3 движутся поступательно, силы инерции этих тел выражаются векторами
![]()
и показываются на расчетной схеме противоположно ускорениям.
Силы
инерции блока 2, вращающегося вокруг
неподвижной оси Oz
с угловым ускорением
![]() ,
приводятся к паре, момент которой равен
,
приводятся к паре, момент которой равен
![]()
и изображается на схеме в сторону противоположную .