

46. Приближенная теории гироскопов. Гироскоп с двумя, тремя степенями свободы. Гироскопический эффект, гироскопический момент.
Гироскоп – твёрдое тело, имеющее одну неподвижную точку и совершающее движение вокруг этой точки с большой угловой скоростью. Если центр тяжести гироскопа совпадает с неподвижной точкой, гироскоп называется астатическим. В любом другом случае - тяжёлым. В общем случае гироскоп имеет три степени свободы. Если угол нутации не меняется, то гироскоп имеет две степени свободы. Гироскоп с двумя степенями свободы участвует одновременно в двух движениях: в собственном вращении с угловой скоростью; и прецессионном. При расчётах с использованием приближённой теории используется теорема Резаля.
U=![]() =M0e
=M0e
У гироскопа с тремя степенями свободы все три угла Эйлера изменяются в процессе движения. Поэтому его движение ограничивается только одной неподвижной точкой О.
М0 вызывает действие на опоры в точках А и В дополнительного момента Мr= - М0r – гироскопического момента. Наличие гироскопического момента называется гироскопическим эффектом.
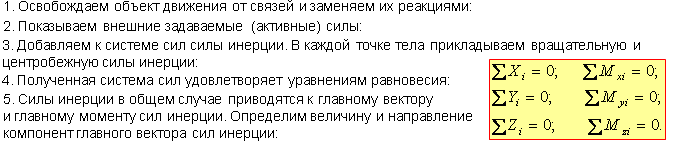
47. Принцип Даламбера для механической системы. Главный вектор и главный момент сил инерции в различных случаях движения твердого тела.
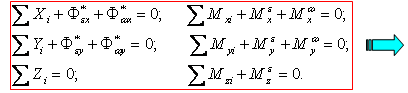
При движении механической системы главный вектор и главный момент внешних сил относительно произвольного центра как бы устанавливается главным вектором и главным моментом относительно того же центра сил инерции.
∑Fke+Ru=0
∑M0(Fke)+M0u=0
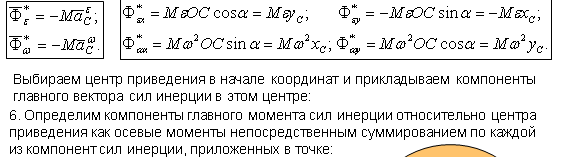
Главный вектор и главный момент сил инерции в различных случаях движения твердого тела:
Поступательное движение
Ru=-M*ac Mzu=0
Вращение тела вокруг оси не проходящей через центр масс.
Ru=-M*ac Mzu=-Iz*ε
Вращение вокруг оси проходящей через центр масс.
Ru=0 Mzu=-Iz*ε
Качение.
Ru=-M*ac= Фщ Mzu=-Iz*ε ε= ac/R
48. Определение динамических реакций подшипников при вращательном движении твердого тела.
![]()




49. Связи и их классификация.
Механическая система называется свободной если её положение или движение не ограничено другими телами не входящими в эту систему (связями).
Связи конструктивно реализуются в виде шарниров, стержней, нитей и т.д. и может описываться в виде уравнений и неравенств.
Виды связи:
Геометрические – связи ограничивающие только координаты точек механической системы
f(x,y,z)=0
Дифференциальные – связи оказывающие ограничения на координаты или скорости системы
f(x,y,z,![]() )=0
)=0
Голономные – все геометрические связи и те дифференциальные, которые могут быть проинтегрированы.
Неголономные – дифференциальные неинтегрируемые связи.
Стационарные – связи характеризующие свое действие в течении времени.
f(x,y,z)=0
Нестационарные – связи действие которых на тело меняется с течением времени.
f(x,y,z,t)=a
Удерживающие – связи ограничивающие положение точки в двух взаимно перпендикулярных направлениях.
Неудерживающие – связи ограничивающие положение точки в одном направлении и допускают ее перемещение в противоположном.