данных2. Ввод


3. Определение постоянных коэффициентов
4.
Q = 0

5.![]()
6. Определение ёмкости конденсатора


8. Определение
![]()
7. Определение
![]()


9. Определение
![]()



да
нет

Рис.
4.3. Структурная
схема расчёта электромагнитных процессов
в СФ необратимого источника энергии
транзисторного ШИП.
11.
Q = Q + 1
формируются зависимости
и
![]() в области допустимых перенапряжений
на конденсаторе. В блоке 12 получаем
распечатки графиков и таблиц значений
параметров элементов силовой цепи
необратимого источника питания для
вариантов перебора между емкостью
конденсатора и его номинальным
напряжением, при обязательном выполнении
условия не превышения пульсациями
напряжения допустимых пульсаций для
выбранного типа конденсатора.
в области допустимых перенапряжений
на конденсаторе. В блоке 12 получаем
распечатки графиков и таблиц значений
параметров элементов силовой цепи
необратимого источника питания для
вариантов перебора между емкостью
конденсатора и его номинальным
напряжением, при обязательном выполнении
условия не превышения пульсациями
напряжения допустимых пульсаций для
выбранного типа конденсатора.
В каждом конкретном случае использования ШИП, в зависимости, от параметров всех элементов замкнутой системы электропривода, следует выбирать такие значения емкости конденсатора и его номинального напряжения, чтобы заряд конденсатора и мощность балластного сопротивления оптимально соотносились между собой, при заданных требованиях к энергетическим, массогабаритным и эксплуатационным характеристикам системы.
При окончательном выборе параметров поперечной ветви силовой цепи необратимого источника питания транзисторного ШИП следует иметь в виду, что удельные характеристики заряда реальных конденсаторов и мощности реальных балластных сопротивлений изменяются не монотонно. И при выборе их параметров необходимо учитывать ряды стандартных габаритных размеров корпусов конденсаторов и сопротивлений.
4.1 Моделирование системы электропривода постоянного тока с учётом свойств силового фильтра и
необратимого источника питания.
Для оценки электромагнитных процессов в силовой цепи систем "ШИП-ДПТ" при различных типах первичного источника питания были разработаны математическая модель системы электропривода, построенная по структуре подчиненного регулирования (рис.4.4).
Моделирование проводилось на ЭВМ в математической программе Mathcad 2000. С помощью этой программы можно оперативно вводить и получать результаты вычислений, а так же легко решать математические задачи возникающие при проектировании.
Модель учитывает свойство односторонней проводимости выпрямительных схем. Это реализовано с помощью коэффициента К1 (рис.4.5), который принимает значение 0 когда напряжение на конденсаторе становится больше чем напряжение питания. По сути дела коэффициент выполняет роль диода.
При описании модели, уравнения удобно представить в виде системы из n уравнений первого порядка в форме Коши:
![]()
где:
![]() - координаты состояния системы;
- координаты состояния системы;
![]() - внешние управляющие воздействия;
- внешние управляющие воздействия;
![]() - коэффициенты, определяющие динамические
свойства системы
- коэффициенты, определяющие динамические
свойства системы
![]() - коэффициенты, определяющие динамическое
влияние внешних управляющих воздействий;
- коэффициенты, определяющие динамическое
влияние внешних управляющих воздействий;
![]() - порядок системы уравнений;
- порядок системы уравнений;
![]() - число внешних управляющих воздействий.
- число внешних управляющих воздействий.
Исследуемой модели будет соответствовать следующая система уравнений

![]() ( 4.18
)
( 4.18
)
где: ![]() - скорость вращения ДПТ;
- скорость вращения ДПТ;
![]() -
ток якоря ДПТ;
-
ток якоря ДПТ;
![]() - интегральные составляющие
ПИ-регуляторов тока и скорости;
- интегральные составляющие
ПИ-регуляторов тока и скорости;
![]() -
ток продольной ветви фильтра;
-
ток продольной ветви фильтра;
![]() -
напряжение конденсатора фильтра;
-
напряжение конденсатора фильтра;
![]() - сигнал задания на входе
системы;
- сигнал задания на входе
системы;
![]() - статический момент
сопротивления на валу ДПТ;
- статический момент
сопротивления на валу ДПТ;
![]() (4.19 )
(4.19 )
- выходные сигналы ПИ-регуляторов тока и скорости соответственно;
![]() - напряжение питания;
- напряжение питания;
![]() - ток питания транзисторного
ШИП;
- ток питания транзисторного
ШИП;
Коэффициенты определяющие динамические свойства системы:
На рис.4.6 структурная схема алгоритма моделирования замкнутой системы электропривода с учётом свойств ёмкости фильтра и односторонней проводимости источника питания. В блоке 2 производится ввод исходных данных, описывающих параметры системы подчинённого регулирования, ДПТ нагрузки и СФ. В блоке 3 формируются постоянные коэффициенты уравнений (4.18). При превышении напряжением на конденсаторе фильтра напряжения питания коэффициенту К1 в блоке 7 присваивается значение 0 и, следовательно, коэффициенты уравнений для определения тока
нет
да
нет
да
нет
да
3. Формирование
постоянных А,В
4. Определение
начальных условий
5. К1 = 1
7. К1 = 0
Рис.4.6.
Структурная схема алгоритма работы
математической модели




























продольной ветви фильтра Y4 также принимают значение 0 в блоке 11. В блоке 9 происходит сравнивание знаков скорости и тока ДПТ, когда машина работает в двигательном режиме эти знаки совпадают и коэффициенту К2 в блоке 8 присваивается значение 1, при переходе в генераторный режим работы знаки скорости и тока различны и коэффициенту К2 в блоке 10 присваивается значение -1, а в блоке 11 соответствующие коэффициенты а и в меняют знак. Далее производится решение уравнений по методу Рунге-Кутта и вывод результатов моделирования в виде графиков.
В качестве исходных данных в описанную модель вводились данные двигателей из справочника [4].
В результате моделирования были получены формы кривых напряжения на конденсаторе фильтра, напряжения на конденсаторе в зависимости в зависимости от его ёмкости для ДПТ типа 2ПБВ – 100М и 2ПБВ – 112L.
Рис.4.7.
Величина
напряжения на конденсаторе фильтра в
зависимости от его ёмкости

На рисунке
4.7 были расчитаны и
построены зависимости
![]() (3.14) по
которым при выбранном значении
номинального напряжения конденсатора
фильтра можно определить величину
ёмкости, при которой напряжение на
конденсаторе поперечной ветви не
превысит выбранного значения.
(3.14) по
которым при выбранном значении
номинального напряжения конденсатора
фильтра можно определить величину
ёмкости, при которой напряжение на
конденсаторе поперечной ветви не
превысит выбранного значения.
Н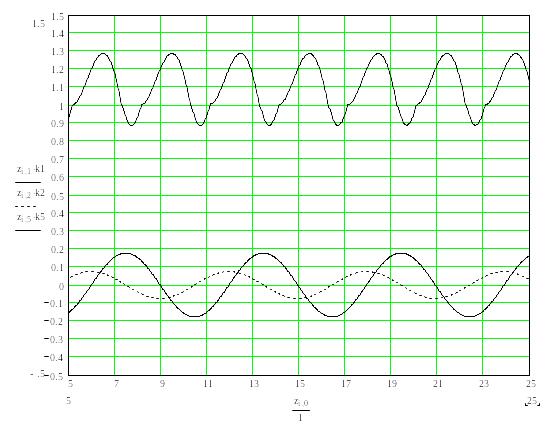 а
рисунках 4.8 и 4.9
получены формы кривых напряжения на
конденсаторе фильтра для параметров
двух ДПТ 2ПБВ – 100 и 2ПБВ -112 предназначенных
для приводов металлообрабатывающих
станков.
а
рисунках 4.8 и 4.9
получены формы кривых напряжения на
конденсаторе фильтра для параметров
двух ДПТ 2ПБВ – 100 и 2ПБВ -112 предназначенных
для приводов металлообрабатывающих
станков.
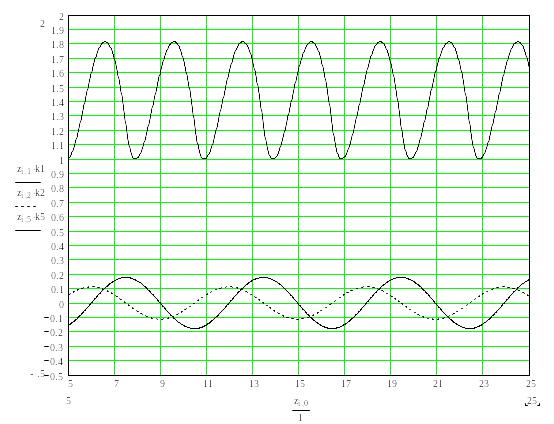
![]()

Время
t,
c
Рис.4.8.
Относительное
напряжение на конденсаторе фильтра в
системе замкнутого электропривода
постоянного тока с двигателем 2ПБВ
– 100M
Время
t,
c
Рис.4.9.
Относительное
напряжение на конденсаторе фильтра в
системе замкнутого электропривода
постоянного тока с двигателем 2ПБВ
– 112L


На рисунке
4.10 получена кривая
напряжения ёмкости фильтра с подключённой
тормозной цепью, которая подключается
к конденсатору при превышении напряжением
![]() .
.
Время
t,
c
Рис.4.10.
Относительное
напряжение на конденсаторе фильтра в
системе замкнутого электропривода
постоянного тока с двигателем 2ПБВ
– 100М
![]()