

6.5.6. Методы уменьшения числа зон слепых скоростей.
Слепая скорость Uсл = n/2Tп. Если имеются две РЛС, работающие на одной несущей частоте, то для того чтобы их слепые скорости отличались одна от другой, необходимо использовать различные периоды повторения импульсов Тл, Это позволяет избежать пропадания сигналов движущихся целей. Вместо двух РЛС можно использовать одну с вобуляцией межимпульсных интервалов либо от импульса к импульсу, либо от одного периода сканирования к другому. Последний способ реализуется проще, но связан со значительными потерями полезного сигнала.
На рис. 6.27, а показаны импульсы синхронизатора, следующие через интервал Тп, а на рис. 6.27, 6 - импульсы запуска модулятора с так называемой двухпериодной вобуляцией, при которой интервал между импульсами составляет Тп1 = Тп + Тп и Тп1 = Тп - Тп. При трехпериодной вобуляции интервал составлял бы Тп + Тп и Тп - Тп Тп и т. д. Возможный способ формирования таких импульсов показан на рис. 6.27, д. Синхронизатор вырабатывает импульсы с периодом Тп. С помощью переключателя, управляемого синхронизатором, между ним и модулятором через один период повторения подключается ЛЗ с задержкой Тп, так что один интервал между импульсами возрастает на Тп, а второй уменьшается на этот же интервал времени.
На рис, 6.27, в изображены видеоимпульсы цели, снимаемые с выхода фазового детектора (вход ЛЗ на рис. 6.27, д). При положениях переключателей, показанных на схеме рис. 6.27, д, в периоды, когда импульсы передатчика задерживаются на время Тп, в цепи фазовый детектор - подавитель задержка отсутствует и наоборот. Поэтому, как видно из рис. 6.27, г, на входе подавителя (точка В на рис. 6.27, г) отраженные импульсы следуют с одинаковым периодом Тп (девобуляция), что обеспечивает обычный режим подавителя.
Рассмотрим теперь скоростную характеристику системы СДЦ с учетом вобуляции периода повторения. Каждой паре отраженных импульсов с интервалом Тп1 = Тп + Тп, и интервалом Тп2 = Тп - Тп, соответствуют разные слепые скорости, В частности, первые слепые скорости равны Vсл1=/2Тп1 и Vсл2=/2Тп2.
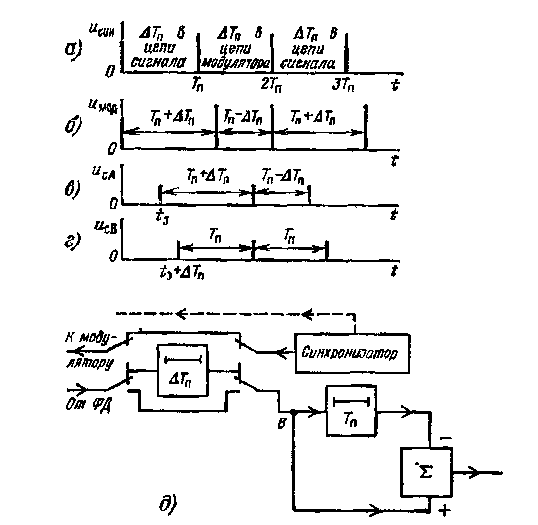
Рис. 6.27. Вобуляция и девобуляция периода повторения
При этом имеются как бы две скоростные характеристики. Одна соответствует СДЦ с частотой повторения Fn1 = 1/Tn1, а вторая - с частотой повторения Fn2 = 1/Tn2 (рис. 6.28, а, где З Tn2 = 2 Tn1). Следует иметь в виду, что точкам 1, 3, 5 и 7 характеристик соответствуют одинаковые амплитуды в смежных периодах повторения, а в точках 2, 4 и 6 импульсы в одном из периодов повторения равны нулю. Остальным точкам соответствуют импульсы разной амплитуды. Вместе с тем первая слепая скорость (для которой импульсы цели в каждом периоде повторения равны нулю) заметно возрастает по сравнению с каждой из двух слепых скоростей.
Результирующая скоростная характеристика может быть определена как результат усреднения этих импульсов по напряжению или по мощности (последнее характерно для индикатора с яркостной отметкой).
Переход к трехпериодной вобуляции позволяет уменьшить провалы. Возможен и более высокий порядок вобуляции, Осуществление таких систем стало реальным в связи с использованием цифровой техники при реализации подавителей. Наряду с вобуляцией межимпульсных интервалов возможен метод уменьшения числа зон слепых скоростей, основанный на использовании различных частот несущих колебаний зондирующих импульсов. Можно, например, излучать две последовательности импульсов, несущие частоты которых отличаются на несколько процентов. Больший разнос связан с техническими трудностями (работа на одну антенну и т. д.).
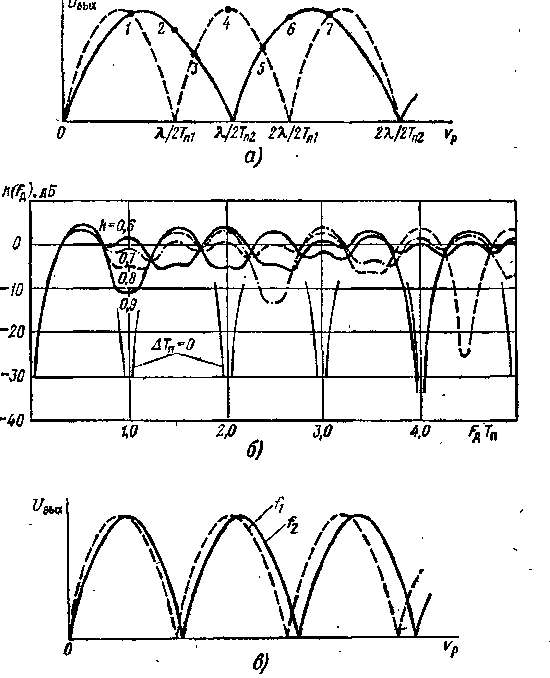
Рис. 6.28. Скоростные характеристики системы СДЦ: а, б - системы с вобуляцией периода повторения, в - система с разносом частот
Использование двух несущих частот f0 приводит к возникновению двух последовательностей слепых скоростей, интервал между которыми растет с увеличением номера слепой скорости (рис. 6.28, в). Применение раздельных систем СДЦ и смешивание выходных сигналов обеспечивает в принципе исключение полностью слепых скоростей. Однако эффективность этого достаточно высока лишь при больших скоростях. Вместе с тем полезность разноса частот несомненна, так как флуктуации, вызывающие неполное подавление, являются случайными и независимыми в каждом из каналов.
Нетрудно видеть из анализа частотной характеристики, что переход к двукратной ЧПК или к более сложной влечет за собой уменьшение степени изменения сигнала вблизи слепых скоростей.