

6.5. Подавители пассивной помехи системы сдц
6.5.1. Метод череспериодной компенсации.
Для выделения полезных сигналов движущихся целей на фоне, пассивных помех используются системы СДЦ, реализуемые с помощью когерентно-импульсных РЛС и включающие специальные РГФ - подавители пассивных помех. Простейшим таким подавителем является устройство череспериодной компенсации (ЧПК).
Как следует из рассмотрения разных вариантов когерентно-импульсных РЛС, на выходе фазового детектора образуются видеоимпульсы, которые в случае движущейся цели пульсируют, а в случае неподвижной имеют постоянную амплитуду. Пассивная помеха также флуктуирует, что приводит к соответствующим флуктуациям амплитуды сигнала на выходе фазового детектора. Однако практически такие флуктуации в ряде случаев достаточно медленны по сравнению с периодом повторения импульсов.
Различие, сигналов движущихся и неподвижных целей обеспечивает возможность их разделения. Очевидно, достаточно сравнить амплитуды сигналов через период повторения импульсов (метод сравнения по огибающей), что в простейшем случае сводится к череспериодной компенсации. Структурная схема устройства ЧПК изображена на рис. 6.17.
Сигналы после фазового детектора без задержки uд(t) . (прямой канал) и с задержкой на период повторения uд(t- Тп) (задержанный канал) поступают на вычитающее устройство, так что образуется функция
uчпк(t) = uд(t) - uд(t- Тп).
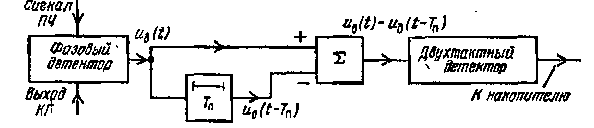
Рис. 6.17. Структурная схема ЧПК
При вычитании одинаковые импульсы компенсируются, а импульсы разной амплитуды дают нескомпенсированный остаток.
Амплитуда видеоимпульсов движущейся цели изменяется по синусоидальному закону как по величине, так и по знаку с доплеровской частотой. В случае же неподвижной цели (Fл = 0) получим Uчпк = 0- Напомним, что в общем случае огибающая видеоимпульсов на выходе фазового детектора системы СДЦ имеет частоту не Fd, а Fог.
На рис. 6.18, а изображена в пределах периода доплеровской частоты смесь сигналов неподвижной (пунктир) и движущейся целей, на рис. 6.18, б показаны те же сигналы, задержанные на время Тп, а на рис. 6.18, в - сигнал на выходе вычитающего устройства. Как видно, в данном идеальном случае сигналы неподвижных целей, за исключением остатков в начале и конце пачки, полностью компенсируются. У сигналов от движущихся целей нескомпенсированные импульсы имеют разные полярности. Перед использованием такого двуполярного сигнала, например, для подачи на накопитель его следует преобразовать в однополярный с помощью двухтактного детектора (рис. 6.18, г). Таким образом, из имеющейся пачки, включающей 10 импу6.18льсов движущейся цели и 10 импульсов неподвижной цели, образовалось 11-пульсирующих по амплитуде импульсов движущейся цели и два нескомпенсированных импульса неподвижной цели.

Рис 6.18. Временные диаграммы процессов в системе ЧПК и сигнал на выходе двухтактного детектора
Следует отметить, что процесс подавления можно продолжить с помощью такого же подавителя, включенного последовательно с первым (двукратная ЧПК).