

6.4.2. Цифровой обнаружитель с «движущимся окном».
В РЛС кругового обзора радиолокационный сигнал в виде пачки импульсов формируется в N периодах зондирования. Так как оптимальной процедурой при любом построении системы межпериодной обработки является накопление в пределах пачки, то для каждого элемента дальности требуется хранение всех отраженных импульсов, полученных при N зондированиях перемещения луча антенны по азимуту хранимая информация должна обновляться. На рис. 6.10, а изображена схема дискретного накопителя с движущимся окном при использовании сдвиговых регистров. Их общее число определяется шириной движущегося окна N (числом импульсов р пачке) и равно N - 1. Число ячеек в регистре m= Тп/Т, где Т - период тактовых импульсов, который можно принять равным интервалу корреляции шума на выходе приемника или же интервалу разрешения по дальности. Так как требуемое число ячеек m достигает нескольких тысяч, можно использовать матричное запоминание.
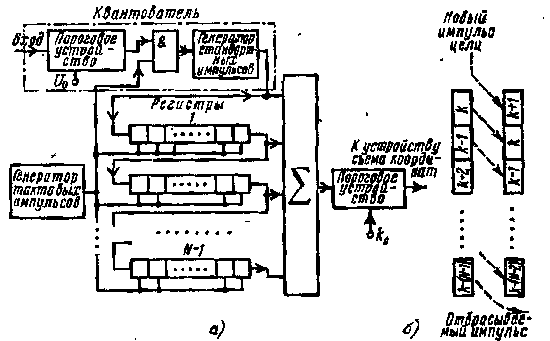
Рис. 6.10. Дискретный накопитель с -«движущимся окном»: о - структурная схема, б - два ряда соседних ячеек дальности
Если в первую ячейку верхнего сдвигового регистра записывается единица, то она под действием тактовых импульсов передается по этому регистру и через период повторения импульсов РЛС Тn попадает на вход второго регистра, а через период 2Тn - на вход третьего регистра и т. д.. Таким образом, получаем устройство, эквивалентное многоотводной ЛЗ на время задержки (N - I) Тп, т. е. идеальный накопитель группового действия.
На рис. 6.10, 6 показаны два ряда соседних ячеек дальности из N - 1 регистров. Во время вращения луча антенны РЛС кругового обзора импульсы целя в двоичном коде после каждого периода повторения сдвигаются на разряд, а на освободившееся место вводится новый импульс. Одновременно принятый импульс для самого раннего зондирования отбрасывается. Далее процесс происходит аналогично, и за N периодов повторения информация регистров полностью обновляется. Наиболее простой метод анализа информации в каждом элементе дальности движущегося окна - это суммирование всех двоичных единиц в пределах «окна» и сравнение в пороговом устройстве с заранее выбранным (вторым) порогом. Часто принимается k0 = N/2, для N 15. В случае k k0 вырабатывается сигнал присутствия цели в данном элементе дальности, а при k < k0 ~- сигнал отсутствия цели.
На рис. 6.11 черные кружки означают прием сигнала с определенного направления (на соответствующей развертке дальности), а светлые - отсутствие сигнала. «Длина» движущегося окна N=10. Изменение состояния регистров сдвига иллюстрируется таблицей. Развертка в направлении р\ является начальной, так как это первая развертка, при которой в окне находится N/2 = 5 сигналов. Развертка в направлении к является конечной, так как это первая раз вертка (после начальной), при которой в окне находится меньше N/2=5 сигналов. Направление на цель 0= (u + )/2.
Отметим, что обнаружитель с движущимся окном (так же, как последовательный обнаружитель) характеризуется рядом дискретных состояний, для которых условная вероятность перехода из одного состояния в другое зависит от последнего состояния и не зависит от поведения системы до нахождения в исходном состоянии. Это характерно для марковских случайных процессов.
Описанное устройство накопления с движущимся окном является хорошим средством борьбы с импульсными помехами в виде несинхронных сигналов и некомпенсированных остатков пассивных помех после подавителя системы СДЦ. Это следует из того, что сигнал присутствия цели вырабатывается только при накоплении в счетном устройстве k0 = N/2 или
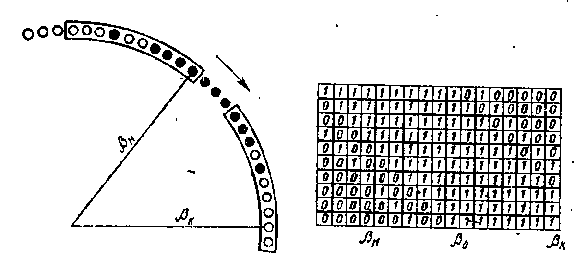
Риг.6.11. Принцип действия цифрового обнаружителя с движущимся окном
более сигналов цели. Импульс помехи, как бы он ни был велик по амплитуде, не имеет достаточной протяженности по азимуту. Вероятность его регистрации как цели за время накопления N импульсов мала.