

5.4.2. Объединение квадратурных каналов по модулю.
Метод накопления в квадратурных каналах проще, чем прием с помощью радиочастотного накопителя в тракте ПЧ, но серьезным недостатком его является необходимость возведения сигналов y1 и у2 после накопителя в квадрат. Заметим, что операция извлечения корня вообще не обязательна, так как выходной сигнал z2=y21+y22 можно сравнивать с порогом z02.
Вместе с тем возможно дальнейшее упрощение. На основании того, что при у1 > у2
![]()
![]() ,
,
можно воспользоваться этим приближением, выбирая большее из |y1|+0,5|y2| и |y2| + 0,5|y1|.
Такая операция осуществляется простым логическим устройством, а деление на 2 особенно просто при цифровой реализации, так как выполняется сдвигом числа. Потери в пороговом сигнале по сравнению с операцией равны лишь 0,2 дБ. Еще проще использование суммы |y1|+|y2| или даже большего из двух модулей. При этом потери не превышают 0,75 дБ при D = 0,9 и F = 10-9.
Операция взятия модуля легко выполняется в аналоговых устройствах с помощью двухтактного детектора, а в цифровых устройствах путем простого отбрасывания знака.
5.4.3. Корреляционно-фильтровая обработка.
Так как когерентная пачка из радиоимпульсов может быть представлена в виде произведения радиоимпульса длительностью NТп, который обозначим s1(t), и периодической последовательности видеоимпульсов длительностью u с периодом Тп, которую назовем стробирующей sстр(t), то сигнал s(t)=s1(t) sстр(t) откуда интеграл взаимной корреляции:
![]() .
.
Таким образом, следует произвести умножение принимаемого сигнала х (t) на стробирующую функцию sстр (t) и далее фильтрацию (интегрирование) с помощью СФ для одиночного радиоимпульса s1 (t) длительностью NТn (рис. 5.14, а). В схеме рис. 5.14, б сигнал с помощью генератора серии сдвинутых друг относительно друга стробирующих импульсов (ГСИ) стробируется одним из селекторов дальности (СД), пропускающим лишь те его части, которые совпадают с импульсами сигнала, т. е. вне стробирования остаются шумы и помехи.
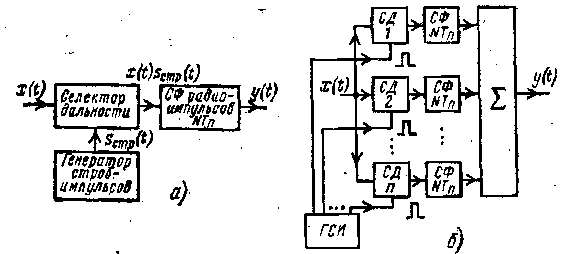
Рис. 5.14. Структурная схема системы корреляционно-фильтровой обработки: а – при известном времени запаздывания, б - при неизвестном времени запаздывания
В качестве СФ для радиоимпульса s1(t) целесообразно использовать квазиоптимальный полосовой фильтр (резонансный контур), настроенный на несущую частоту радиоимпульсов (практически это соответствует промежуточной частоте приемника) с полосой пропускания fопт - 0,4/NТП. Заметим, что в данном случае частота Fд известна. В противном случае требуется многоканальность по частоте. Поступающие на фильтр радиоимпульсы длительностью u растягиваются до величины примерно NТn накладываются один на другой и когерентно суммируются (рис. 5.15), что и определяет такую же эффективность накопления на фоне шумов, как в схемах рис. 5,13, б, в. После СФ может быть включен амплитудный детектор и пороговое устройство, как в схеме рис. 5.13, в.
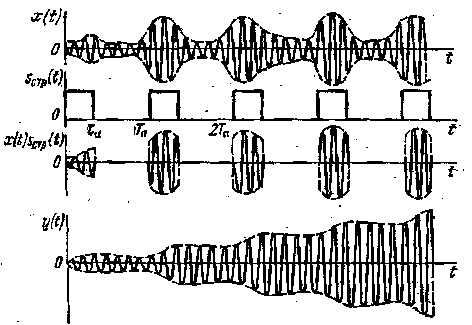
Рис. 5.15. Временные диаграммы сигналов при корреляционно-фильтровой обработке: х(t) - входной сигнал; sотр(t) - cтробирующиe импульсы для одного канала дальности; y(t) - выходной сигнал
Данная система обработки не требует применения весьма сложных устройств, как на рис. 5.9, б, использующих многоотводную линию задержки на время NТn. Однако без потерь обрабатываются лишь те импульсы, которые совпадают со стробирующими, т. е. отсутствует инвариантность системы к времени прихода, свойственная СФ, у которых нет элементов с переменными параметрами. Поэтому для обработки реальных сигналов с неизвестным временем прихода надо использовать многоканальную систему, изображенную на рис. 5.14, б.