

1.3. Импульсные сигналы
Импульсом называется кратковременный электрический сигнал, длительность которого меньше или соизмерима с продолжительностью переходных процессов в электрических цепях, возникающих при воздействии этого сигнала.
В радиолокации, чаще всего, используется серии импульсов, а время паузы между ними всегда превышает продолжительность переходных процессов.
Переходные процессы, как правило, заканчиваются к приходу следующего импульса, то действие импульса можно рассматривать независимо друг от друга. Значит, анализ воздействия импульсной последовательности может быть сведен к изучению переходных процессов при воздействии одного импульса.
Видеоимпульсом называется электрический сигнал, который получается при быстром изменении напряжения либо тока, вначале в одном направлении, а затем в другом (рис.1.2).
Пусть функция f(t) описывает форму импульсного сигнала, тогда:
Y(t) = A f(t),
где А – амплитуда сигнала.
Радиоимпульсом называется кратковременный электрический сигнал, во время существования которого напряжение и ток изменяются по гармоническому закону. Аналитически радиоимпульс может быть записан в виде:
Y(t) = A f(t) cos (0 t +0),
где А – амплитуда, f(t) – огибающая импульса, - круговая частота высокочастотных колебаний, 0 – начальная фаза ВЧ колебаний.
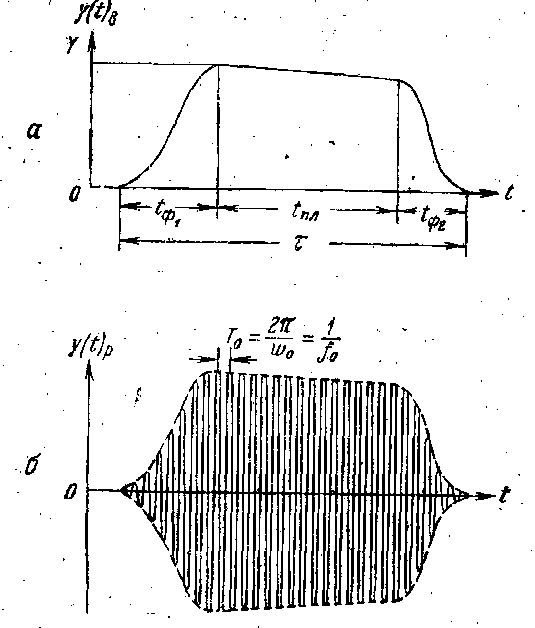
Рис.1.2. Видеоимпульс (а) и радиоимпульс (б)
Форма огибающей импульсных сигналов влияет на точность определения координат, разрешающую способность и некоторые другие параметры. Желательна прямоугольная форма огибающей, которая обеспечивает фиксацию появления сигналов и их воздействие на различные виды устройств. Кроме того, плоская вершина импульса повышает стабильность частоты и мощности на выходе магнетрона.
Однако, огибающая реальных импульсов представляет собой плавную кривую и не может быть описана аналитическими выражениями. Поэтому принято ее аппроксимировать простыми функциями: прямоугольной, трапециидальной, колоколообразной и экспоненциальной.
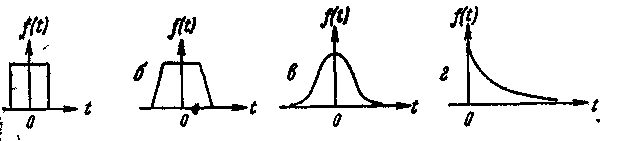
Рис.1.3. Форма импульсов: а - прямоугольный, б - трапецеидальный, в-колокольный, г - экспоненциальный
Рассмотрим энергетические составляющие одиночного импульса. Мгновенное значение импульсной мощности равно:
P(t) = k A2 [f(t)]2,
где к – коэффициент пропорциональности, который при импульсе тока представляет собой активное сопротивление, а при импульсе напряжения – активную проводимость.
Максимальное значение мощности достигается в момент, когда амплитуда импульса f(t)=1, тогда
P(t)= k A2.
Энергия импульса для функции любого вида равна:
 .
.
Обычно рассматривают среднее значение импульсной мощности за время действия импульса:
![]() ,
,
где - длительность импульса на нулевом уровне.
Среднее значение импульсной мощности показано на рис.1.4,а.
При оценке мощности радиоимпульса следует понимать среднюю мощность за период несущей частоты. Очевидно, что для прямоугольного импульса W= k A2, а для импульсов любой другой формы W k A2.
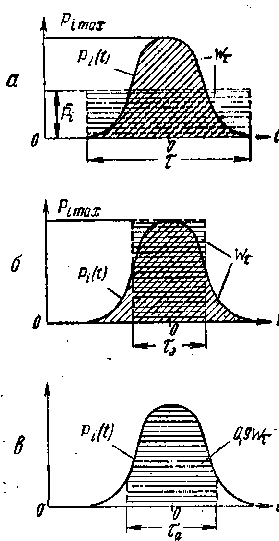
Рис. 1.4. Энергетические характеристики импульса.
Эффективной длительностью импульса э называется длительность импульса прямоугольной формы с такой же амплитудой А и энергией W, как и для исследуемого импульса произвольной формы (рис.1.4,б). Так как энергия эквивалентного прямоугольного импульса
W= k A2э,
то эффективная длительность импульса определяется из соотношения:
 .
.
Активной энергетической длительностью импульса а называется промежуток времени (рис. 1.4, в), в котором сосредоточена подавляющая часть энергии импульса W, где =0.9.
Исходя
из определения а
находим:
Если f(t) – частотная функция времени, то интегрирование в правой части производится в пределах от -а/2 до +а/2.
Импульсные радиолокационные сигналы (рис. 1.5) обычно
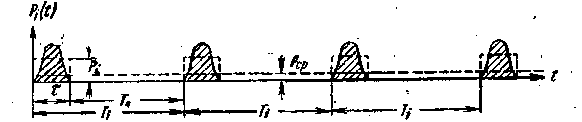
Рис. 1.5. Периодическая последовательность видеоимпульсов
представляют собой серию периодически повторяющихся импульсов с практически неизменной формой, длительностью и амплитудой. Такие последовательности характеризуются следующими временными параметрами:
длительностью импульса и,
периодом следования Тс,
периодом повторения Тп= и+ Тс,
частота повторения импульсов f =1/ Тп,
скважностью Q= Тп/и.
Для последовательности импульсных сигналов всегда выполняется неравенство и Тп , поэтому скважность Q1
Неравенство Q1 является основным временным соотношением импульсного сигнала.
С энергетической точки зрения последовательность зондирующих импульсов характеризуется:
средней мощностью Pср=W/Тп,
мощность в импульсе Pи= Pср Q,
мощность максимальная Pmax=PсрТп/э.
Эти выражения являются основными энергетическими соотношениями для периодического импульсного сигнала.
Для большинства современных РЛС значение временных параметров лежат в пределах:
и = 0.1-10 мкс,
Tп = 100-2000 мкс,
Q = 50-2000.
Импульсная мощность наземных РЛС Ри = 0.001 –10 МВт, средняя мощность Рср меньше импульсной мощности в Q раз.