

4.3.2. Изочастотные линии.
Для получения одного и того же доплеровского сдвига Fд ось луча, направленного вниз к земной поверхности под углом места к вектору скорости v, не обязательно должна лежать в вертикальной плоскости. Имеется геометрическое место точек пересечения оси луча с земной поверхностью, для которых доплеровский сдвиг частоты остается постоянным. Найдем это геометрическое место точек.
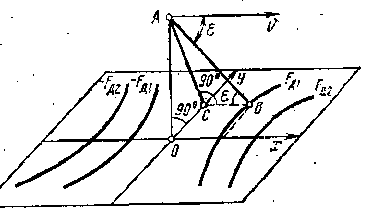
Рис. 4.4. Изочастотные линии на плоской земной поверхности при горизонтальном перемещении РЛС
На рис 4.4 направление АВ, образующее угол с вектором v, по отношению к земной поверхности выбрано произвольно.
Линии равных доплеровских частот имеют вид семейства гипербол, именуемых изочастотными линиями (или изодопами). При = 90° (на линии, расположенной непосредственно под летательным аппаратом) Fd=0. Линии, расположенные впереди летательного аппарата, соответствуют положительному сдвигу доплеровских частот (+Fд), а сзади - отрицательному (-FД).
Интервал между изочастотными ливнями характеризует чувствительность однолучевой доплеровской измерительной системы к углу поворота луча антенны в горизонтальной плоскости.
Чувствительность повышается при переходе к многолучевым системам, используемым в доплеровских измерителях скорости и угла сноса - ДИСС.
4.3.3. Измерение угла сноса с помощью вторичного эффекта Доплера.
На рис. 4.5. «показан навигационный треугольник скоростей, состоящий из горизонтальной составляющей воздушной скорости, совпадающей с осью самолета V, скорости ветра U н результирующего вектора, совпадающего с линией пути, W. Угол сноса (УС) отсчитывается между векторами V и W по часовой стрелке, а путевой угол (ПУ) отсчитывается между северный направлением меридиана и вектором путевой скорости W по часовой стрелке.
С помощью бортовой РЛС, обладающей достаточно острым лучом, направленным в сторону земной поверхности, можно измерить УС на основе фиксации минимальной частоты биений при вторичном эффекте Доплера.
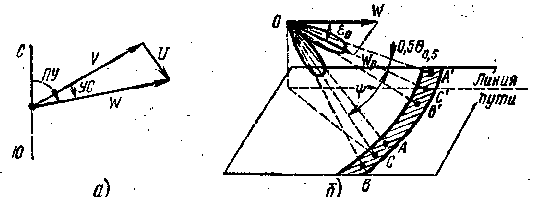
Рис. 4.5. Определение угла сноса: а-навигационный треугольник скоростей, б - к объяснению изменения частоты биений вторичного эффекта Доплера.
На рис. 4.5, б изображена узкая полоса земной поверхности, облучаемой при разных положениях антенны РЛС. Если ось луча смещена относительно линии пути на угол , то частоты колебаний, отраженных от всех точек облучаемого участка земли, отличаются друг от друга. Наибольшее отличие соответствует точкам А и В. При этом
![]() ,
,
![]() ,
,
где Wр = W cos 0 - радиальная составляющая путевой скорости W.
Колебания, отраженные от разных точек, смешиваются на входе приемника и образуют биения Fd. Максимальная частота биений возрастает с увеличением угла отклонения оси луча от линии пути. Если же такого отклонения нет, то частоты колебаний, отраженных от точек А' и В', равны между собой и наибольшая частота биений образуется при отражении от точек О и В' (или А').
Для определения угла сноса нужно изменить положение антенны в горизонтальной плоскости до получения минимальной частоты биений вторичного эффекта Доплера. При этом угол по шкале поворота антенны между осями антенны и самолета равен углу сноса.
Для зондирующего сигнала в виде некогерентных импульсов следует иметь в виду, что отраженные импульсы от равноудаленных целей имеют одинаковую (хотя и случайную) начальную фазу. Поэтому при достаточно высокой частоте повторения изменения амплитуды импульсов на входе приемника за счет биений будет происходить так же, как для амплитуды непрерывных колебаний.