

3.2.4. «Гребенка» фильтров доплеровских частот.
В двух рассмотренных устройствах предполагалось, что полоса пропускания усилителей приемника рассчитана на диапазон ожидаемых доплеровских частот. Если имеется лишь одна цель, т. е. не требуется никакого разрешения по скорости, то достаточно иметь на выходе приемника простой частотомер, например, в виде счетчика. При наличии же множества целей спектр колебаний состоит из соответствующего числа спектральных линий. Для разделения этих линий, т. е. разрешения по скорости, необходимо произвести спектральный анализ принимаемого сигнала.
При последовательном спектральном анализе имеется один фильтр, перестраиваемый с определенной скоростью в диапазоне ожидаемых доплеровских частот. Время воздействия полезного сигнала на такой фильтр гораздо меньше, чем его общая длительность, что равносильно потерям полезной энергии. Параллельный спектральный анализ обычно осуществляется с помощью системы, состоящей из набора пф =f/F фильтров, где f - общая полоса ожидаемых доплеровских частот, Fф - полоса пропускания фильтров. При этом обеспечивается минимальное, время анализа без потерь полезного сигнала Тпар 1/Fф. При последовательном анализе это время возрастает до Тпос n/Fф.
Для получения максимальной чувствительности полоса пропускания отдельных фильтров должна быть согласована с шириной спектра. В частности, при расширении спектральных линий отраженного сигнала только из-за конечного времени облучения цели (например, при круговом обзоре) требуемая полоса фильтров Fф = 1/Tобл.
Для определения требуемой полосы пропускания фильтров при учете ускорения цели следует задаться некоторым конечным отрезком времени t, в течение которого частота под влиянием эффекта Доплера изменяется. Он должен быть не меньше, чем время нарастания переходных процессов в фильтре, т. е. t 1/Fф. В результате получаем
![]() .
.
Если, например, цель совершает маневр с перегрузкой ар = 19,6 м/с2 (2g) (что довольно много для пассажирского самолета), то при = 10 см имеем Fф 20 Гц.
Знание ширины спектральных линий F позволяет, кроме того, определить потенциальную разрешающую способность по скорости. Из основного соотношения Fd = = 2vр/ находим vр = F/2.
При реализации набора фильтров могут быть использованы фильтры:
электромеханические,
кварцевые,
активные фильтры на полупроводниковых элементах.
Если набор фильтров установлен в канале промежуточной частоты, то их число должно быть в два раза больше по сравнению с видеочастотным каналом, однако при этом имеется возможность сохранить знак доплеровского сдвига частоты. В этом случае в РЛС на рис. 2.7 не нужен смеситель, связанный с генератором fпч, но этот генератор должен обладать высокой стабильностью. Структурная схема набора фильтров показана на рис. 2.8, а, а их частотная характеристика - на рис. 3.8, б: Центральные частоты отдельных фильтров равны fпч ± Fк, где к - номер фильтра относительно центрального.
Нулевая доплеровская частота соответствует центральной частоте фильтра fпч, остальные частоты ±Fд соответствуют фильтрам, настроенным на частоты fпч ± Fд. Таким образом, появление максимума сигнала на выходе того или иного из них позволяет судить не только о скорости, но и о ее знаке. Если требуется устранить помехи от
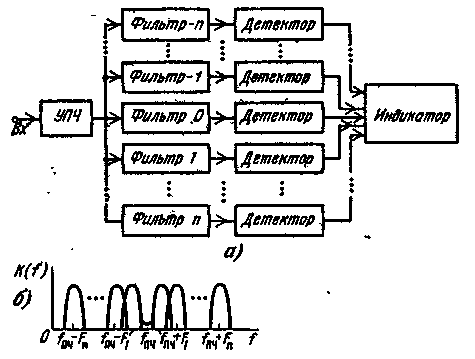
Рис. 3.8. «Гребенка» фильтров доплеровских частот
неподвижных объектов, то можно использовать режекторный фильтр, настроенный на центральную частоту fпч (рис. 3.8, б).