

2.7.3. Влияние распространения радиоволн в атмосфере на дальность действия рлс
При определении дальности предполагалось, что распространение радиоволн происходит в однородной атмосфере. Фактически атмосфера неоднородна, и ее коэффициент преломления определяется формулой

где Tв - абсолютная температура воздуха, К; в - барометрическое давление воздуха, Па; п - парциальное давление водяных паров (влажность), Па.
 -
-
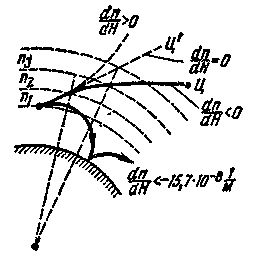
Рис. 2.25. K влиянию рефракции.
Для стандартной атмосферы у поверхности земли n= 1,0003. По мере увеличения высоты в пределах тропосферы давление в, температура Тв и влажность а уменьшаются. Это приводит к искривлению луча в сторону горизонта, именуемому положительной рефракции В результате кажущееся направление на цель отличается от истинного, что приводит к погрешности измерения высоты и дальности. При больших дальностях и малых углах места даже небольшое изменение угла вследствие рефракции приводит к значительной ошибке по высоте (рис. 2.25).
Погрешности измерения дальности из-за рефракции связаны с изменением скорости распространения радиоволн и искривлением траектории распространения радиоволн. Погрешность растет с увеличением высоты, достигая установившегося значения при Н = 15 ...30 км. Это установившееся значение погрешности падает с ростом угла места е (например, примерно от 90 м для = 0° до 50 м для = 2°).
Положительная рефракция увеличивает дальность действия РЛС, как бы отодвигая горизонт. Это можно трактовать как кажущееся увеличение радиуса Земли. Для стандартной атмосферы радиус возрастет в 4/3 раза (т. е. надо пользоваться эквивалентным радиусом земли Rзэ = 4Rз/3 = 8500 км).
Отклонение от стандартной атмосферы приводит к пониженной и повышенной положительным рефракциям, а также к отрицательной рефракции (dn/dH > 0), когда луч искривляется вверх. Предельным случаем положительной рефракции является сверхрефракция (аномальное волноводное распространение), при котором коэффициент n уменьшается с высотой H настолько быстро, что в нижних слоях тропосферы происходит полное внутреннее отражение. Для этого требуется, чтобы градиент коэффициента преломления dn/dH был меньше - 15,7 10-8м-1. Возникновение сверхрефракции связано с повышением температуры или понижением влажности с высотой. Она ограничена небольшими углами места, не превышающими. (1 ...1,5)°. Высота атмосферного волновода несколько десятков метров. Наиболее известные районы, в которых наблюдается сверхрефракция, тропические, где РЛС с дальностью несколько десятков километров могут обнаруживать цели на расстоянии свыше тысячи километров.
Затухание радиоволн в атмосфере обусловлено поглощением их энергии свободными молекулами кислорода и водяного пара, а также взвешенными частицами - пылинками и каплями воды. Кроме того, происходит рассеяние радиоволн жидкими и твердыми частицами, которое вызывает эффект, аналогичный поглощению энергии. При распространении вдоль трассы длиной D затухание в децибелах определяется из соотношения 10 lg Р1/Р2, где Р1 и Р2 - мощности в начале и конце трассы. Удельное затухание на единицу длины Г = (10 lg Р1/Р2)/D, откуда отношение мощностей
![]()
где -коэффициент затухания среды по напряженности, км-1; причем Г = 8,68 дБ км-1.
Теоретическое значение затухания, вызванного поглощением и рассеянием радиоволн водяным паром и кислородом. Для водяного пара имеются значения удельного затухания Г1, дБ/км, на единицу плотности воды в г/м3, содержащейся в паре. Например, в летнее время в средних широтах при температуре 20° содержание воды (плотность водяного пара) составляет М = 7,5 г/м3, а при насыщении оно доходит до 17 г/м3. Затухание равно Г = Г1М. При длине волны > 10 см влиянием водяного пара на затухание можно пренебречь. На волнах 0,17; 1,35 см (водяной пар) и 0,25; 0,5 см (кислород) происходит наиболее сильное поглощение энергии из-за резонансных явлений.
Следует отметить, что вследствие более высоких концентраций водяного пара и давления около половины всех потерь в тропосфере приходится на первые 300 м высоты. При оценке общего затухания в атмосфере можно воспользоваться таблицами. При этом затухание Г, дБ/км, с ростом высоты падает почти линейно.
На затухание радиоволн заметное влияние оказывают осадки в тропосфере из-за поглощающих и рассеивающих свойств отдельных частиц.
Если, например, самолет летит на расстояние D = 200 км и на всем пути идет средний дождь (I = 10 мм/ч), то затухание составляет 200 • 2 • 0,0003 • 10 = 1,2 дБ при = 10 см и 200 • 2 • 0,00005 • 10 = 0,2 дБ при = 23 см.