

2.6. Цифровые методы съема координат цели
Дискретное измерение времени запаздывания основано на заполнении этого интервала счетными импульсами, имеющими достаточно высокую и стабильную частоту повторения Fc, после чего с помощью счетчика определяется их число
NС = 2D Fc/c.
Схема простейшего устройства, работающего по такому принципу, изображена на рис. 2.19, а. Импульс синхронизатора РЛС посредством триггера открывает каскад совпадения, через который счетные импульсы поступают на счетчик («пуск»), а импульс цели закрывает его («стоп»). Счетчик отсчитывает число импульсов за указанный промежуток времени. Так как показание дальности изменится только тогда, когда число Nc изменится по крайней мере на единицу, то имеет место дискретность отсчета, равная Dd = с/2Fc.
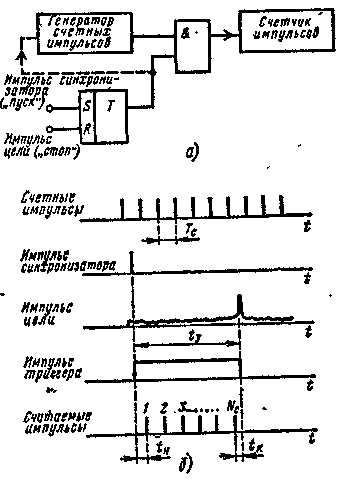
Рис. 2.19. Съем дальности цифровым методом
На рис. 2.19, б показаны временные диаграммы импульсов при несогласованном положении импульса синхронизатора и счетных импульсов.
Устройство, показанное на рис. 2.19, а, позволяет за период повторения зондирующих импульсов измерить дальность только до одной цели, так как в момент прихода сигнального импульса цели поступление счетных импульсов на счетчик прекращается. Такое же действие может оказать помеха. Этот недостаток устраняется в схеме, показанной на рис. 2.20. Здесь импульс синхронизатора запускает генератор строба, который на время, равное 2Dmах/c, отпирает каскад совпадения для прохождения счетных импульсов. После окончания строба счет прекращается и двоичный счетчик возвращается в исходное состояние.
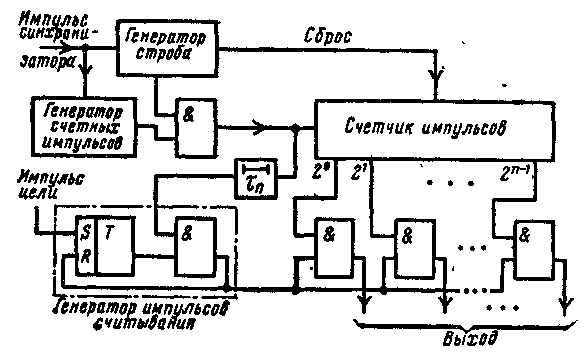
Рис. 2.20. Цифровой съем дальности до многих целей
Считывание текущей дальности происходит в момент поступления импульса цели на генератор импульсов считывания. Этот генератор представляет собой комбинацию триггера и каскада совпадения. Импульсы цели проходят в счетчик на считывание лишь по окончании переходных процессов в триггерах счетчиков. Для этого импульс цели запускает триггер, импульс которого совпадает со счетными лишь после задержки в ЛЗ на время, равное длительности переходных процессов п. Импульс на выходе каскада совпадения генератора импульсов переводит его триггер в исходное состояние и одновременно воздействует на каскады совпадения счетчика, который выдает число, соответствующее дальности до цели. Это число в двоичном коде может поступить в блок памяти ЭВМ. При этом процесс счета не прекращается и с приходом другого импульса цели выдается другое значение дальности.
Для уменьшения ошибки конца счета tк применяется нониусный метод, основанный на использовании дополнительной точной шкалы. На рис. 2.21 показаны импульсы цели «стоп» и серия счетных импульсов. Импульс «стоп» запускает нониусный генератор,
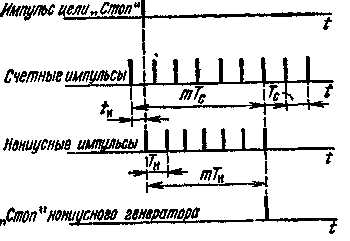
Рис 2.21. Нониусный метод измерения дальности
период колебаний которого Тп несколько, отличается от периода счетных импульсов Тс. Пусть Тн < Т0. Импульсы нониусного генератора прекращаются в момент совпадения счетного и нониусного импульсов. Такое совпадение наступает при выполнении условия tк = m (Тс - Тн), где m - целое число, фиксируемое по номеру нониусного импульса.
В этом методе величина tК измеряется с точностью до T = Тс - Тн. Однако с уменьшением этой разности повышаются требования к стабильности генераторов и удлиняется время отсчета. При этом методе может также заметно ухудшиться разрешение по дальности.