

2.2. Минимальная дальность действия импульсной рлс.
При использовании в РЛС двух отдельных антенн для передачи и приема можно довести минимальную дальность до практически несущественной величины.
В случае же одноантенной РЛС минимальное расстояние до цели («мертвая зона») может оказаться достаточно ощутимым. Это объясняется тем, что антенный переключатель должен запирать приемник на время, равное длительности импульса, а после окончания импульсов передатчика требуется время на восстановление антенного переключателя (процесс деионизации газового разрядника); в течение этого времени чувствительность приемника остается заниженной. Таким образом, минимальное расстояние, начиная с которого возможно наблюдение отраженного импульса цели, Dmin = с(tи + tв)/2, где t в - время восстановления чувствительности приемника; в некоторых случаях, например при неисправном газовом разряднике защиты приемника, это время может заметно превзойти величину и.
2.2.1. Принцип действия импульсной рлс кругового обзора
Дальнейшим развитием импульсного дальномера является РЛС, позволяющая производить обзор пространства и измерять одну из угловых координат цели, чаще всего азимут. Структурная схема простейшей РЛС кругового обзора с визуальной индикацией цели изображена на рис. 2.3.
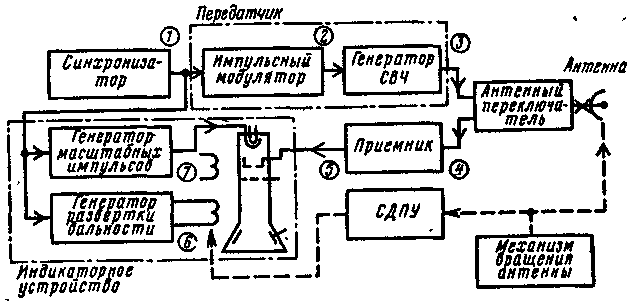
Рис. 2.3. Структурная схема импульсной РЛС кругового обзора
Антенна РЛС имеет веерообразную диаграмму направленности (ДН) -т.е. узкую в горизонтальной плоскости (шириной в несколько градусов или долей градуса) и широкую (десятки градусов) в вертикальной плоскости. При вращении такая антенна обеспечивает не только требуемый обзор в вертикальной и горизонтальной плоскостях, но и измерение азимута. Этот принцип сохраняется как для обзора воздушного пространства (наземная РЛС), так и для обзора земной поверхности (бортовая РЛС).
Для визуальной индикации двух координат цели необходим двумерный индикатор кругового обзора (ИКО) с яркостной отметкой цели. В ИКО обычно применяется ЭЛТ с магнитным отклонением луча. Импульсные сигналы с выхода приемника подаются, на управляющий электрод ЭЛТ и увеличивают яркость свечения экрана во время их появления.
Развертка дальности осуществляется с помощью отклоняющей катушки, создающей магнитное поле, которое равномерно перемещает электронный луч от центра экрана ЭЛТ к его краю по радиусу. Азимутальная развертка, т. е. круговое вращение развертывающего луча дальности синхронно с антенной, создается либо вращением отклоняющей катушки с помощью системы дистанционной передачи угла - СДПУ, либо посредством специально формируемых отклоняющих напряжений, питающих неподвижные отклоняющие катушки. В качестве СДПУ часто используется следящая сельсинная система с грубыми и точными каналами, обеспечивающая достаточно высокую точность передачи.
Временные диаграммы процессов в характерных точках, обозначенных цифрами в кружках на рис. 2.3, показаны на рис. 2.4. Синхронизатор РЛС формирует периодическую последовательность импульсов с периодом Тп, которые воздействуют одновременно (либо, как будет показано ниже, с некоторым постоянным запаздыванием) на
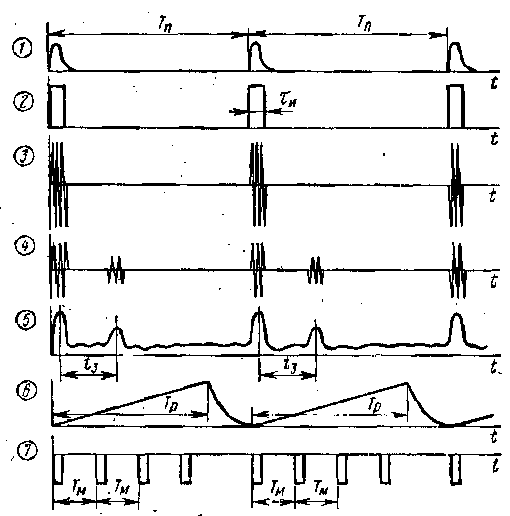
Рис. 2.4. Временные диаграммы процессов в РЛС кругового обзора (номера временных диаграмм соответствуют точкам на рис. 2.3)
модулятор, генератор развертки дальности и генератор масштабных импульсов. Импульсный модулятор вырабатывает модулирующие видеоимпульсы длительностью и воздействующие на генератор СВЧ. Последний генерирует радиоимпульсы приблизительно той же длительности. Периодическая последовательность этих импульсов излучается антенной в виде зондирующего сигнала.
Описанный метод синхронизации РЛС от генератора синхронизирующих импульсов называется внешним. Наряду с этим иногда используется внутренняя синхронизация от независимо работающего модулятора.
Отраженный импульс появляется на входе приемника через интервал времени 3 На выходе приемника образуются видеоимпульсы, смешанные с шумом, которые подаются на управляющий электрод ЭЛТ.
Генератор развертки дальности вырабатывает в отклоняющей катушке пилообразно изменяющийся ток, длительность прямого хода которого
Тр = 2Dшк/с.
При этом, как указывалось, электронный луч совершает равномерное движение вдоль радиуса ЭЛТ, который, в свою очередь, вращается вместе с антенной. Такая развертка луча на экране ЭЛТ называется радиально-круговой. Она создает на экране изображение (часто именуемое растром ) в виде ряда тесно примыкающих друг к другу радиусов.
Генератор масштабных импульсов вырабатывает серию импульсов с периодом повторения Тм = 2Dм/с,
где Dм - требуемый интервал между масштабными импульсами.
Эти импульсы могут быть периодическими, если выполняется условие Тп = nТм, где n - целое число, либо иметь вид пачек, действующих в пределах длительности прямого хода развертки Тр. Такие импульсы можно формировать, например, с помощью генератора ударного возбуждения. Часто применяются масштабные импульсы отрицательной полярности, подаваемые на катод ЭЛТ (это облегчает развязку выходных цепей приемника и генератора масштабных импульсов). Механизм формирования изображения на экране ЭЛТ поясняется рис. 2.5. При вращении антенны, когда начинается облучение цели (направление 1), на соответствующем радиусе развертки под действием импульса цели возникает яркая точка (амплитуда сигнала характеризуется отрезком А В диаграммы направленности). Кроме того, возникает серия эквидистантных ярких точек под действием масштабных импульсов. Радиусы развертки
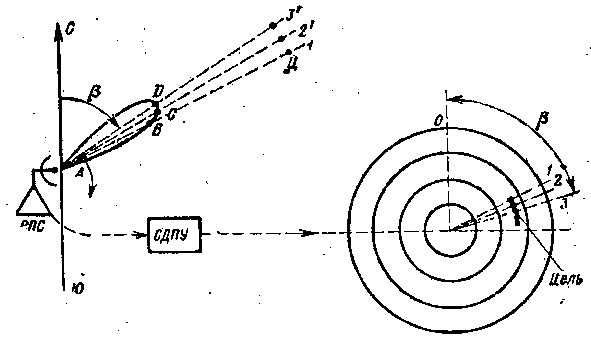
Рис. 2.5. Формирование изображения в ИКО
занимают соответствующее положение 2 и 3, и вдоль них возникают в тех же местах, что и в предыдущем случае, яркие точки (амплитуда сигнала характеризуется отрезками АС и СD). После полного оборота антенны на экране образуются масштабные кольца (электронная шкала дальности), а цель будет иметь вид небольшой дуги, угловые размеры которой приблизительно равны угловой ширине луча антенны.
Дальность цели отсчитывается с помощью масштабных колец. Например, для случая, показанного на рис. 2.4, D 2,7DМ. Азимут же цели отсчитывается по положению середины ее отметки относительно какого-либо начального направления, например северного направления меридиана.
Допустимая частота вращения антенны РЛС кругового обзора может быть определена на основе разных критериев. Простейший из них основан на условии получения слитного растра на экране ИКО.
Угол между соседними радиусами развертки равен углу поворота антенны за период повторения импульсов и составляет (в градусах)
ор = аТп = 360 Тп/Та,
где а -- угловая скорость вращения антенны, °/с, а ТА - период ее вращения, с.
Так как частота вращения антенны (мин-1)
Na = 60/Fn, то ор = 6nА/Fп.
Число радиусов развертки в пределах всего растра
Nр = 360/ор = 60 Fп/na.
Например, при nа = 6 мин-1 и Fп = 400 с-1 имеем Nр = 4000, т. е. число радиусов развертки достаточно велико.
Так как каждая точка развертки одновременно участвует в двух равномерных движениях по прямой и по окружности, то радиусы развертки оказываются несколько искривленными, образуя начальный участок спирали Архимеда. Однако учитывая, что Fп А/360°, углы ор оказываются достаточно малыми, так что обычно наблюдается слитный растр, в котором искривление отдельных радиусов незаметно. Угол между соседними радиусами, при котором еще сохраняется их перекрытие на краю экрана,
ор (360°/2) (dп/гшк),
где dп - диаметр сфокусированного пятна ЭЛТ, а rшк - длина шкалы дальности вдоль радиуса экрана.
Затем находим, что для этого требуется частота вращения антенны (мин-1)
nа 30 dп Fп/ rшк).
Минимальное число радиусов, необходимое для получения «слитного» растра,
Nр min = 2 rшк/dп.
В некоторых случаях, особенно при высоком качестве фокусировки современных ЭЛТ, неравенство не выполняется. Тогда на больших дальностях у края экрана отметка цели расслаивается. Чтобы исключить непривычный характер изображения цели, оператор может немного расфокусировать луч.
Другой критерий определения допустимой частоты вращения антенны основан на получении достаточного числа импульсов, отраженных от цели за время ее облучения. В дальнейшем будет показана связь этого числа с важными техническими параметрами РЛС - вероятностями правильного обнаружения и ложной тревоги.
При постоянной частоте вращения антенны время облучения цели Т0бл составляет такую же часть периода вращения ТА, какую соответствующая ширина луча в азимутальной плоскости ор составляет от 3600, т. е.
Тобл = Та /360°.
Если теперь ограничить частоту повторения импульсов Fn условием однозначности определения дальности, т. е. Fп < с/2Dmax, то ,
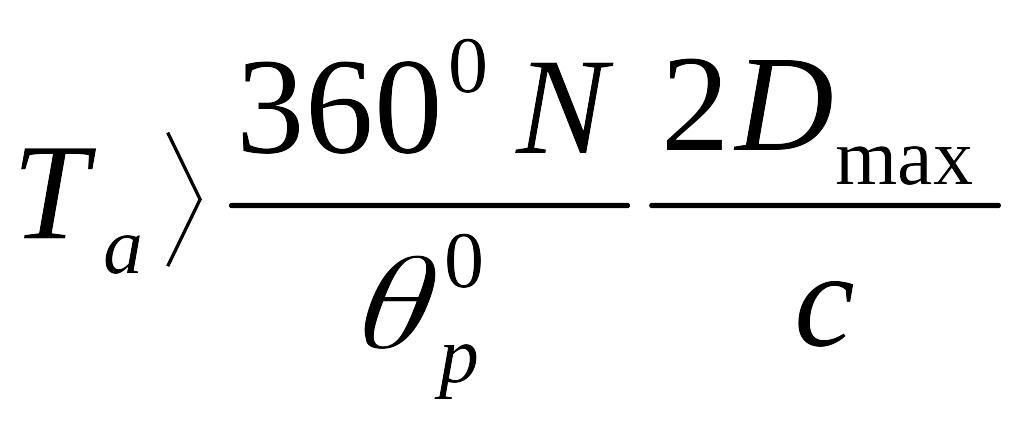
или
 .
.
Таким образом, частота вращения антенны n А в РЛС кругового обзора, а следовательно, скорость вращения радиуса развертки дальности в ИКО ограничена. Чем больше дальность, тем меньше допустимая скорость вращения и тем продолжительнее требуемое время обзора.