

Заключение
Главной цель курса обучения дисциплине «Теория автоматического управления» является получения навыков по синтезу автоматических систем управления. При этом полученные системы должны соответствовать требованиям критериям качества их работы. Важным аспектом ТАУ является то, что для одной и той же системы мы можем рассчитать несколько вариантов систем управления, что и подтверждает данная курсовая работа.
В ходе данной курсовой работы для объекта были рассчитаны следующие системы управления :
Непрерывным ПИД-регулятором и компенсатором внешнего возму-щения.
Дискретный регулятор для дискретной системы, а так же компенсатор для возмущения
используя квадратичный критерий оптимальности , метод Крассовского, построили график оптимального управления
релейным регулятором, который обеспечивает необходимую точность управления.
Все произведённые расчёты является базой для построения замкнутых автоматических систем и для инженерных расчетов при анализе существующих и проектировании новых систем автоматического управления.
В заключении отметим, что в настоящее время для целей синтеза автоматического регулирования используются электронные вычислительные машины, позволяющие производить полное или частичное моделирование проектируемой системы. В курсовой работе для расчётов были использован математический пакет MATLAB 7.13.
Список использованных источников
1 Теория автоматического управления : учебное пособие для студентов специализирующихся в области автоматического управления техническими системами / И. Ф. Кузьмицкий, Г. Т. Кулаков. – Минск : БГТУ, 2006. 486 с.
2 Теория систем автоматического регулирования. Бесекерский В.А., Попов Е.П., издательство “Наука”, главная редакция физико-математической литературы, М., 1972, 768 с.
3 Кулаков Г. Т. Инженерные экспресс-методы расчета промышленных систем регулирования: Спр. пособие. − Минск: Высш. школа. 1989. −192 с.
4 Ротач В. Я. Теория автоматического управления теплоэнергетическими процессами: Учебник для вузов. − М.: Энергоатомиздат, 1985. − 296 с.
5 Кулаков Г. П. Анализ и синтез систем автоматического регулирования: Учеб. пособие / Г. Т. Кулаков. − Минск: УП «Технопринт», 2003. − 135 с.
6 Избраные главы теории автоматического упровления с примерами на языке MatLab. / Б.Р. Андриевский, А.Л. Франдков – СПб.: Наука, 2000. – 475 с.
7 Справочник по теории автоматического управления / Под ред. А. А. Красовского. – М.: Наука, 1987. – 712 с
Графический материал Приложение а
1Моделирование синтезированной системы непрерывного объекта управления
Система непрерывного управления состоит из объекта управления, который представлен двумя придаточными объекта и детерминированным возмущение, непрерывного регулятора(ПИД-регулятором), компенсатора возмущения, отрица-тельной обратной связи, двух упредителей Смита, устройства сравнения, уст-ройства задания и регистрации выходной величины. Данная модель представлена на рисунке 10:
Рисунок 1 – система непрерывного управления
Регулятор имеет следующие значения: Kp=0.12,Kd=8.35,Ki=0.000449, а компенсатор следующую придаточную:
![]() (А.1)
(А.1)
Переходная характеристика данной системы имеет вид:
Рисунок 2 – переходная характеристика модели непрерывного управления
Управляющее воздействие на объект имеет вид:
Рисунок 3 – зависимость управляющего воздействия на объект от времени
А эффективность работы компенсатора можно оценить следующей переходной характеристикой, когда Ужел=0, а на объект оказывает влияние только возмущение:
Рисунок 4 – реакция объекта на возмущение с учетом компенсатора
В нашей системе мы не можем использовать ПИ, П регуляторы, т.к. передаточная функция имеет И-составляющую(система будет уходить в бесконечность). При синтезе с ПД регулятором нам не удалось получить желаемый показатель коллебательности.
Поэтому мы использовали ПИД регулятор для синтеза необходимой нам системы с Мжел=1.33
2 Приложение
Б
Моделирование
синтезированной системы дискретного
объекта управления
Приложение
Б
Моделирование
синтезированной системы дискретного
объекта управления
Дискретная модель управления объекта состоит из следующих элементов: придаточных объекта в z-области, дискретного регулятора, дискретного компен-сатора возмущения, отрицательной обратной связи, устройства сравнения, устро-йства задания и регистрации выходной величины.
Рисунок 5 – дискретная модель управления объектом
Придаточные дискретного регулятора и компенсатора имеют следующее виды:
3.857 z^2 - 7.619 z + 3.762
Wzr= --------------------------------- (Б.1)
z^2 - 0.5021 z - 0.4979
0.1562z^3-0.0772z^2-0.07837z-0.0006055
Wzk=z^(-1)*--------------------------------------------- (Б.2)
3.857z^3-9.959z^2+8.384z-2.282
Переходная характеристика данной системы имеет вид:
Рисунок 6 – переходная характеристика дискретной модели управления
Рисунок 7 – зависимость управляющего воздействия на объект от времени
Рисунок 8 – реакция объекта на возмущение с учетом компенсатора
3Приложение В Интегральный квадратичный критерий. Метод Красовского

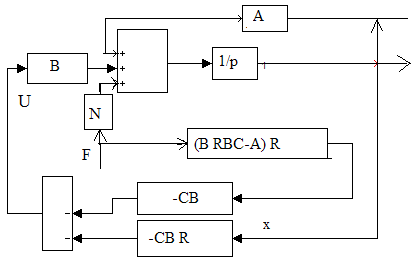
Рисунок 9 - Синтез оптимального управления
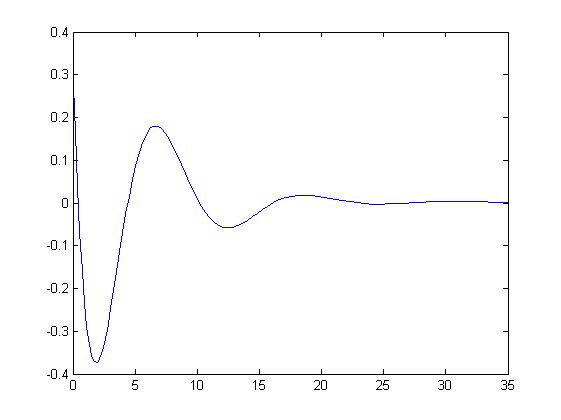
Рисунок 10 – переходная характеристика объекта
1Приложение Д Моделирование синтезированной модели релейного регулятора
Система управления непрерывным объектом на основе реле состоит из: реле, объекта, отрицательной обратной связи, устройства сравнения, устройства задания и регистрации выходной величины.
Рисунок 11 – модель управления с релейным регулятором
 Выход
реле при включении ±0.002 единиц амплитуды
задания.
Выход
реле при включении ±0.002 единиц амплитуды
задания.
Рисунок 12 – переходная характеристика релейной модели управления
Рисунок 13 – переходная характеристика релейной модели управления
Отклонение установившегося значение от желаемого не превысило 3%, что и требовалось при расчёте регулятора.