

Вопросы для самоконтроля
Что такое навигационные параметры?
Чем отличаются изолиния и линия положения?
В чем заключается отличие счислимого места судна от обсервованного?
Что такое градиент навигационного параметра?
Как влияет неодновременность измерения навигационных параметров на обсервованное место судна?
Как учитываются погрешности места судна?
Какова последовательность действий при обсервации?
Глава 2 определение места судна по пеленгам и горизонтальным углам
Определение места судна по пеленгам относится к визуальным способам, наряду с определениями места по горизонтальным и вертикальным углам.
Еще в 60-е годы прошлого столетия такие определения составляли 90% всех определений на морских судах и судах смешанного (река-море) плавания. В 80-х и 90-х годах положение существенно изменилось: возросла доля радиолокационных обсерваций, определения расстояний по вертикальным углам практически вытеснены радиолокационными измерениями; определения места по горизонтальным углам применяются лишь в особых случаях. Тем не менее, простые, достаточно надежные и точные определения по двум и трем пеленгам остаются основными при плавании в видимости берегов.
2.1 Определение места судна по пеленгам двух навигационных ориентиров
Сущность способа и его практическое выполнение. Способ определения места судна по двум пеленгам — один из наиболее распространенных при плавании в узкостях или вдоль берега, вблизи навигационных опасностей. Это объясняется тем, что часто в видимости судна большего количества ориентиров, нанесенных на карту, одновременно не бывает.
Определяемым навигационным параметром является истинный пеленг на навигационный ориентир. Навигационному параметру соответствует навигационная изолиния ИП = const, которая называется изопеленгой или изоазимутой. Изоазимута представляет собой линию, проходящую через навигационный ориентир и место судна. Градиент пеленга определяется выражением g = l/D. Он направлен по нормали в сторону возрастания пеленга.
Обсервованную точку получают в пересечении двух линий положения, которыми являются линии истинных пеленгов. Кроме того, так как одновременно пеленговать два ориентира один наблюдатель не может, то для уменьшения или практически полного уничтожения ошибки из-за неодновременности пеленгования применяют специальные приемы.
В быстрой последовательности берут пеленги двух объектов (маяков, знаков, мысов и др.) с таким расчетом, чтобы угол между направлениями на них был по возможности близким к 90° но, во всяком случае, не меньше 30° и не больше 150°. Первым пеленгуют ориентир, расположенный ближе к диаметральной плоскости (ДП) судна, т. е. находящийся на более остром курсовом угле. Пеленг в этом случае меняется медленно. При ночном пеленговании порядок будет зависеть от характеристики огня. Первым пеленгуют огонь, у которого более редкие проблески, или тот, который пеленгуется с трудом из-за плохой видимости или удаленности. Если скорость судна более 10 узлов и расстояния до ориентиров незначительны (2—3 мили), измеренные пеленги необходимо приводить к одному моменту. Для этого берут компасный пеленг первого ориентира, затем второго, после чего вновь пеленгуют первый ориентир. Значения двух пеленгов первого ориентира усредняют, приводя тем самым средний пеленг к моменту пеленгования второго ориентира:
ОКП
= ![]()
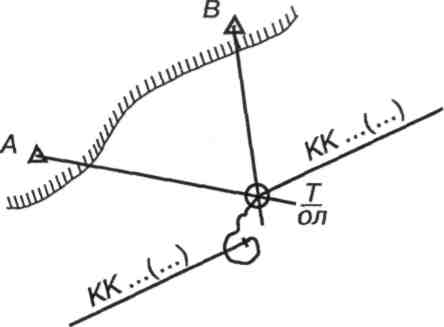 Рис.
2.1. Определение места судна по пеленгам
двух навигационных ориентиров
Рис.
2.1. Определение места судна по пеленгам
двух навигационных ориентиров
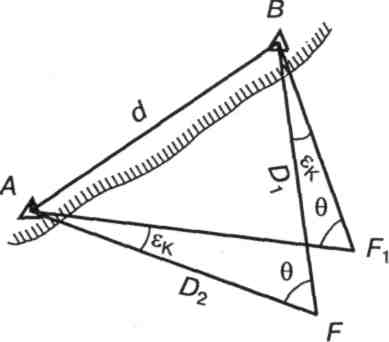 Рис.
2.2. Влияние систематической погрешности
пеленга
Рис.
2.2. Влияние систематической погрешности
пеленга
Время и показания лага замечают при взятии второго пеленга.
Компасные пеленги исправляют поправкой компаса в истинные и прокладывают на карте (рис.2.1).
Точность способа. Точность полученного обсервованного места, если исключено влияние ошибок от неодновременности взятия пеленгов, зависит от погрешности в принятой поправке компаса и случайных погрешностей при пеленговании.
Если при использовании пеленгов была допущена ошибка в принятом или неучтенном значении поправки компаса, то нанесенное на карту место судна (точка F) не будет совпадать с истинным (точка F1) (рис.2.2).
Средняя квадратическая погрешность этого места оценивается по формуле:
FF1
=![]() (2.1)
(2.1)
где k — систематическая погрешность в поправке компаса, град; — угол между направлениями градиентов первого и второго пеленгов, град; d — расстояние между ориентирами, мили. Из формулы видно, что влияние погрешности в поправке компаса будет наименьшим, когда угол равен или близок к 90°. Если же угол между направлениями на ориентиры меньше 30° или больше 150°, то к полученному обсервованному месту следует относиться с осторожностью.
Пеленгованию, как любому измерению, сопутствуют случайные погрешности, к которым можно отнести погрешности из-за неточности наведения, колебаний в момент качки, отсутствия стабилизации в вертикальной плоскости и др. Это приводит к тому, что любому измеренному пеленгу соответствует погрешность тп, град. Если такую погрешность подставить в формулу (1.9), то получим формулу для средней квадратической погрешности обсервации по двум пеленгам:
M0
= ![]()
![]() (2.2)
(2.2)
где D1 , D2 — расстояния до ориентиров, морские мили; — угол между направлениями градиентов первого и второго пеленгов, град.
Отсюда следует, что точность определения зависит от угла 0 и расстояний до ориентиров.
При совместном учете систематических и случайных погрешностей средняя квадратическая погрешность места судна оценивается по формуле:
M0
=
![]() (2.3)
(2.3)
где mп — СКП пеленгов, град; r — коэффициент корреляции погрешностей первого и второго пеленгов:
• при благоприятных условиях измерения пеленгов и при ориентировочно известной поправке компаса в момент пеленгования r = 1;
при неблагоприятных условиях пеленгования (качка, ограниченная видимость) и при надежно известной поправке компаса в момент пеленгования r = 0;
во всех других случаях r = 0,5.
При незначительных случайных погрешностях наблюдения и уверенности в правильности учитываемой поправки компаса точность определения места судна по двум пеленгам вполне удовлетворительная. Однако отсутствие третьей контрольной линии пеленгов не позволяет выявить грубые ошибки из-за неверного опознания ориентиров, резкого изменения поправки компаса или промаха, допущенного при измерении, записи или прокладке пеленга. Именно поэтому обсервация по двум компасным пеленгам относится к разряду обсерваций с невысокой степенью надежности. Контроль отсутствия промахов осуществляется производством повторной обсервации, а надежность учитываемой поправки компаса определяется сравнением данной обсервации с местом судна, полученным по другим навигационным параметрам, не связанным с компасом. При одиночном определении по двум пеленгам грубая ошибка может быть выявлена при сопоставлении обсервованного и счислимого (на тот же момент) места с учетом их точности.