

Средство автоматической радиолокационной прокладки
Средство автоматической радиолокационной прокладки (САРП) предназначено для предупреждения столкновения судов и подготовки принятия рационального решения по выбору маневра в сложной навигационной обстановке путем непрерывной, точной и быстрой оценки ситуации.
Эксплуатационные требования к САРП определены в Резолюции Ассамблеи ИМО А.823(19), принятой в ноябре 1995 г., а также в Правилах по оборудованию морских судов морского регистра судоходства.
Ниже приводятся основные из них:
захват целей может быть ручным или автоматическим при относительной скорости до 100 узлов; при автоматическом захвате должен быть предусмотрен запрет захвата в определенных зонах обзора;
должно обеспечиваться автоматическое сопровождение, обработка, одновременное отображение и непрерывное обновление данных не менее чем по 20 целям; сопровождаемые цели должны быть четко обозначены на экране соответствующими символами; информация на индикаторе не должна затенять данные от РЛС;
на экране по требованию должно отображаться по крайней мере четыре равноразнесенных цели за период, соответствующий используемой шкале дальности при одновременном указании временной шкалы прокладки предыдущих положений;
должны быть предусмотрены, по крайней мере, шкалы дальности 3, 6 и 12 миль, при этом дополнительно могут быть использованы и другие шкалы дальности, соответствующие требованиям резолюции А.477(ХП);
САРП должно допускать работу в режиме относительного движения при ориентации изображения "Север" и "Курс" со стабилизацией от гирокомпаса, а также в режиме истинного движения;
информация о курсе и скорости по захваченным целям должна выдаваться в векторной или графической форме;
должна быть предусмотрена возможность быстрого определения пеленга и расстоянии до любого объекта, появляющегося на экране;
при автоматическом захвате цели на экране через одну минуту должна отображаться тенденция ее движения, и в течение 3 мин — предвычисленный вектор перемещения;
наблюдатель должен иметь возможность выбрать любую сопровождаемую цель для получения информации; при этом по запросу должны немедленно выдаваться следующие данные: текущие дистанция D и пеленгП, курсК и скорость V, дистанция кратчайшего сближения D и время Т следования до точки кратчайшего сближения;
должна быть предусмотрена возможность имитации маневра своего судна на расхождение со всеми сопровождаемыми целями с упреждением по времени или без него относительно момента имитации.
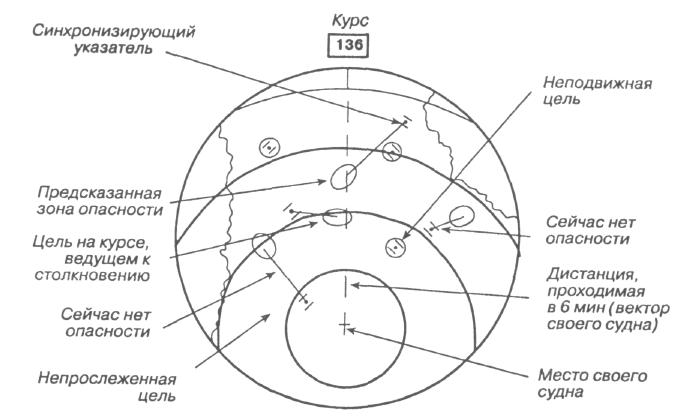
Рис.7.8. Отображение радиолокационной информации в виде зон опасностей
Кроме того, САРП, как правило, включает две НРЛС, одна из которых работает в трехсантиметровом, а другая в десятисантиметровом диапазоне длине волн, что обеспечивает их эффективное функционирование в различных гидрометеорологических условиях.
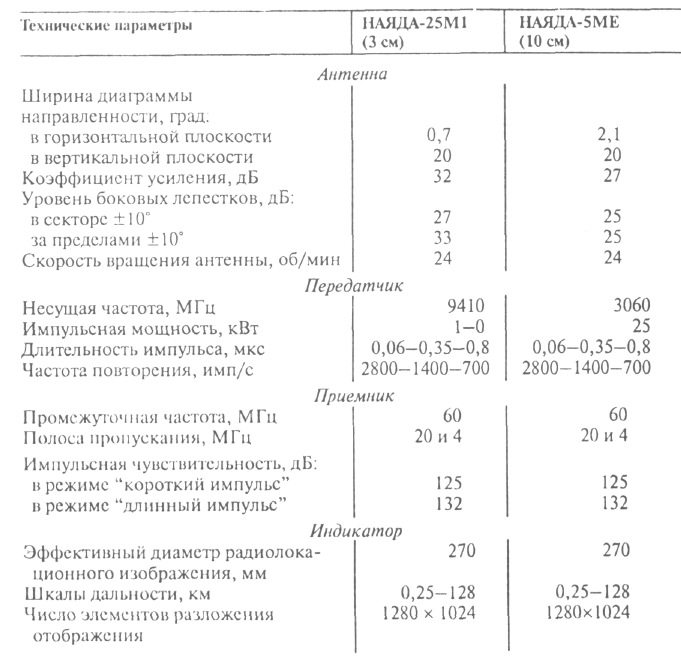
В табл.7.2 представлены эксплуатационные характеристики современных отечественных НРЛС, используемых в составе САРП. Эти НРЛС имеют следующие возможности:
яркое цветное изображение с высоким разрешением на жидкокристаллическом мониторе;
отображение обобщенной информации о своем судне (географические координаты, курс, скорость, глубина под килем, текущее время);
межобзорное накопление;
увеличение масштаба выбранного участка изображения с отдельной его индикацией на дополнительном поле экрана;
ориентацию изображения: КУРС, СЕВЕР, КУРС СТАВ;
режимы относительного и истинного движения со смещением центра развертки в пределах 2/3 радиуса изображения;
измерители координат целей (визиры направления и дальности, электронная линейка и координатный маркер);
автообнаружение и сигнализация о нахождении целей в охранной зоне;
Таблица7.2. Эксплуатационные характеристики РЛС
следы относительного движения целей с регулируемым времеем их длительности;
автоматическое сопровождение до 50 целей с индикацией параметров движения и параметров сближения с предупреждением об опасности столкновения и имитацией маневров на расхождение (САПР);
вывод данных САРП в систему отображения морских электронных карт;
стабилизацию изображения и графической информации относительно воды и грунта;
электронную карту и контроль плавания по маршруту;
контроль якорной стоянки.