

7.3 Определение места судна с использованием
радиолокационных маяков-ответчиков и отражателей
Определение места судна по радиолокационным маякам-ответчикам (РЛМк). Радиолокационные маяки-ответчики представляют собой устройства, излучающие электромагнитные импульсы в диапазоне судовых РЛС в ответ на ее запросный сигнал. Они предназначены для создания активных радиолокационных ориентиров, обеспечивающих уверенное радиолокационное опознавание и определение места судна по пеленгу и расстоянию до них. Радиолокационными маяками-ответчиками оборудуются:
районы интенсивного плавания, сложные в навигационном отношении, где маяки, береговые и плавучие знаки не дают четкого изображения на экране судовой РЛС или не опознаются среди других объектов;
районы побережья, расположенные вблизи рекомендованных путей, трудно опознаваемые на экранах судовых РЛС (низменные берега с прямолинейной или плавно изгибающейся береговой линией, низкие песчаные косы, осушные или низменные острова и мысы, подвижные береговые линии в районах с приливными колебаниями);
районы с частыми продолжительными туманами, осадками;
кромки льда, ледовых обрывов, пакового льда.
С учетом атмосферной рефракции радиоволн наибольшая дальность действия РЛМк в милях рассчитывается по формуле
D=2,2(![]() +
+![]() ), (7.4)
), (7.4)
где Н— высота РЛМк от уровня моря, м; h — высота антенны судовой РЛС, м.
В настоящее время наибольшее распространение получили РЛМк с синхронизированным ответом, работающие на частотах судовых РЛС, что позволяет видеть отметки маяков на экране одновременно с радиолокационным изображением. Принцип их действия заключается в следующем. Зондирующий импульс от судовой РЛС (запрос) принимается антенной маяка, детектируется, усиливается и подается на схему выработки кодовых сигналов и генератор самозапуска. Импульсы кодовой комбинации поступают на передатчик, обеспечивающий модуляцию частоты, проходят в антенну и излучаются в пространство. На экране РЛС по направлению излучения появляется несколько отметок (кодовая комбинация), из которых ближайшая к ответчику находится в удалении от маяка, равном истинному расстоянию, плюс задержка импульса запроса в цепях ответчика.
При отсутствии запрашивающих импульсов передатчик отключается и маяк находится в режиме ожидания. РЛМк включается в работу после поступления двух последовательных запрашивающих импульсов, при условии, что второй прошел в приемник не позже определенного интервала времени после первого. Этим обеспечивается предупреждение срабатываний, вызванных случайными сигналами.
Для обеспечения возможности использования РЛМк всеми судами на них применяется метод изменения ("качания") частоты. Маяки-ответчики передают импульсы на частоте, плавно изменяющейся в пределах определенного диапазона. Ответный сигнал на экране РЛС появляется в тот момент, когда частота маяка совпадает с частотой, на которую настроена судовая РЛС. Таким образом, за время одного периода изменения частоты происходит один раз совпадение частот маяка-ответчика и судовой РЛС, и сигналы маяка появляются на экране РЛС через промежутки времени, соответствующие периоду "качания" частоты, который обычно равен 60—120 с.
Сигнал РЛМк имеет на экране РЛС вид прерывистой линии, соответствующей опознавательному сигналу маяка, или сплошной непрерывной линии, расположенной радиально за эхо-сигналом маяка-ответчика на расстоянии нескольких сотен метров. С помощью РЛМк можно определить пеленг и расстояние до него. Следовательно, для оценки точности определения места по РЛМк может быть использована формула (7.5). Однако точность определения места судна и в этом случае ниже, чем но четким точечным ориентирам. Причиной этого является погрешность в задержке ответного сигнала, достигающая величины 0,5—1 кбт.
Определение места судна по пассивным отражателям. Радиолокационные пассивные отражатели применяются для повышения отражательной способности навигационных знаков, плавучих предостерегательных знаков, а также обозначения отдельных точек, расположенных на водной поверхности или на низменном побережье, не имеющем характерных радиолокационных ориентиров.
По конструктивному исполнению различаются следующие виды отражателей:
а) плоская металлическая пластина отражает максимум электромагнитной энергии и обратном направлении лишь в том случае, если радиоволны падают перпендикулярно к ее поверхности. Эффективная площадь отражения плоской пластины
 б) двугранный
уголковый отражатель состоит
из двух плоских пластин,
расположенных под углом 90° и имеющих
общее ребро.
Диаграмма
отраженного сигнала двугранного
отражателя имеет максимальное
значение в биссекторной плоскости.
б) двугранный
уголковый отражатель состоит
из двух плоских пластин,
расположенных под углом 90° и имеющих
общее ребро.
Диаграмма
отраженного сигнала двугранного
отражателя имеет максимальное
значение в биссекторной плоскости.
Эффективная площадь отражения в биссекторной плоскости
в)трехгранный
Рис.7.5. Спиральный пассивный отражатель
Радиолокационная дальность обнаружения отдельных уголковых отражателей D в километрах рассчитывается по формуле
D
= ![]()
Отдельные уголковые отражатели применяются редко, так как они не обеспечивают отражения со всех сторон. Для получения отражения при облучении с любых направлений уголковые отражатели монтируются в группы. Для этих целей применяются:
а) на береговых СНО - спиральные пассивные отражатели (рис. 7.5).
 б) на
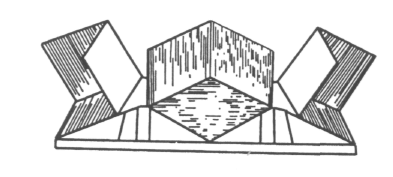
буях и вехах - шестиуголковые и
восьмиуголковые отражатели
(рис. 7.6).
б) на
буях и вехах - шестиуголковые и
восьмиуголковые отражатели
(рис. 7.6).
Рис.7.6. Шестиуголковый пассивный отражатель
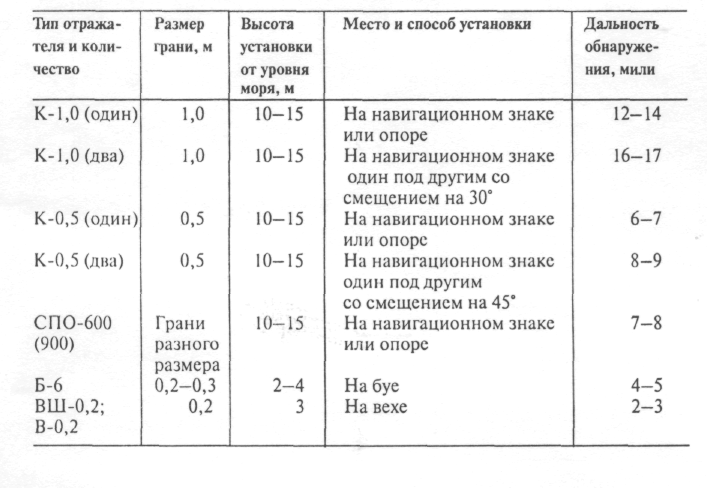 Таблица7.1.
Типы
пассивных уголковых отражателей
Таблица7.1.
Типы
пассивных уголковых отражателей
Основные типы пассивных уголковых отражателей, применяемых в практике навигационного оборудования, приведены в табл.7.1.
Радиолокационные отражатели также применяются для ограждения фарватеров. Для этого пассивные отражатели устанавливаются парами, по одному с каждой стороны фарватера, на равном расстоянии от его оси и на перпендикулярной линии к ней.
Этот способ использования пассивных отражателей получил название радиолокационных дистанционных створов. Если эхо-сигналы обоих отражателей будут находиться на одном и том же подвижном круге дальности (ПКД), то это означает, что расстояние до них одинаково и судно находится на оси фарватера (рис.7.7). Если же отражатели не находятся на одном ПКД, то необходимо изменить курс в соответствующую сторону.
Таким образом, при проводке судна по радиолокационным дистанционным створам должно выдерживаться равенство расстояний до радиолокационных отражателей. Точность плавания по таким створам определяется в основном погрешностью наблюдателя в оценке положения эхо-сигналов отражателей относительно ПКД.
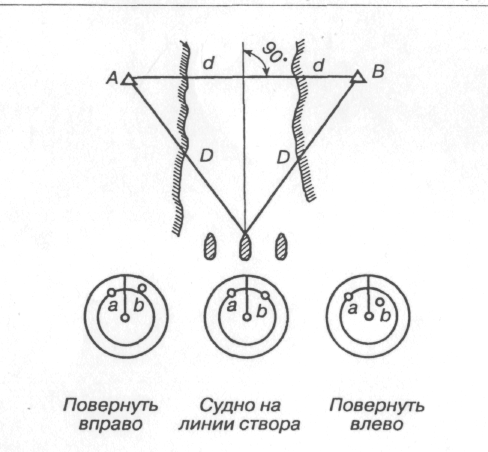
Рис.7.7. Дистанционные радиолокационные створы