

Вопросы для самоконтроля
В каких случаях применяется ОМС по крюйс-пеленгу,
В чем сущность исправленного способа ОМС?
Как практически определяется место по исправленному способу?
Чем отличается обсервованное место и счислимо обсервованное?
Как определяется ОМС по крюйс-расстоянию?
Какова точность ОМС по разновременным линиям положения?
Глава 5.
КОМБИНИРОВАННЫЕ СПОСОБЫ ОПРЕДЕЛЕНИЯ МЕСТА СУДНА
В практике судовождения широкое применение находят способы определения места судна с использованием разнородных навигационных параметров. Эти способы в общем случае позволяют повысить надежность обсервации, быстроту обработки навигационной информации и, в конечном счете, точность плавания судна.
Безусловно, при реализации способов определения места судна по разнородным навигационным параметрам в силе остаются как общие положения по определению места судна, рассмотренные ранее в главе 1, так и основные свойства изолиний при измерении горизонтальных и вертикальных углов, пеленгов ориентиров, рассмотренных в главах 2-4.
5.1. Определение места судна по пеленгу и вертикальному углу
Сущность способа. Данный способ реализуется в двух вариантах:
пеленг и вертикальный угол измеряются относительно одного ориентира;
пеленг измеряется относительно одного ориентира, а вертикальный угол — относительно другого.
Первый вариант находит применение в том случае, когда виден один ориентир с известной высотой Н. Измеряя пеленг на ориентир и определяя расстояние до него по измеренному вертикальному углу, получаем две навигационные изолинии - изоазимуту и изостадию. При относительно небольших расстояниях, что свойственно всем визуальным способам определения места судна, эти изолинии пересекаются практически под прямым углом. На карте в проекции Меркатора изоазимута изображается отрезком прямой, проведенной по направлению ОИП от ориентира. Изостадия изображается окружностью, проведенной из места ориентира радиусом, равным определенному расстоянию (рис. 5.1, а).
Если определение места производится по отдаленному ориентиру, то при плавании в высоких широтах измеренный пеленг дополнительно исправляется ортодромической поправкой.
оип

Второй вариант находит применение в том случае, когда невозможно измерить пеленг и определить расстояние относительно одного и того же ориентира (рис.5.1,6).
Радиальная средняя квадратическая погрешность обсервованного места судна:
![]() =
= ![]()
![]() (5.2)
(5.2)
![]() — угол между направлениями на ориентиры.
— угол между направлениями на ориентиры.
Точность места повышается (при прочих равных условиях) с уменьшением расстояния до ориентира.
В судовом журнале делается следующая запись:
20.00. ол = 57,3, Мк А - 43°,5 (К+0,7), ОС = О°07,4' (i+s) = 01,3', е = 11 м, h = 33 м, D= 56 миль, С= 20° — 1,8 мили.
5.2. Определение места судна по пеленгу и горизонтальному углу
Сущность способа. Данный способ находит применение в том случае, когда один из двух находящихся в поле зрения ориентиров невозможно запеленговать (например, ориентир не наблюдается с места установки пеленгатора).
Измеренному пеленгу наблюдаемого ориентира соответствует навигационный параметр - изоазимута, измеренному горизонтальному углу между направлениями на ориентиры - изогона. Обсервованное место - в точке пересечения изолиний (рис. 5.2).
На карте, выполненной в проекции Меркатора, это место может быть получено тремя способами:
построением навигационных изолиний;
переходом к определению места по двум пеленгам;
с помощью кальки с нанесением на нее измеренного гори
зонтального угла.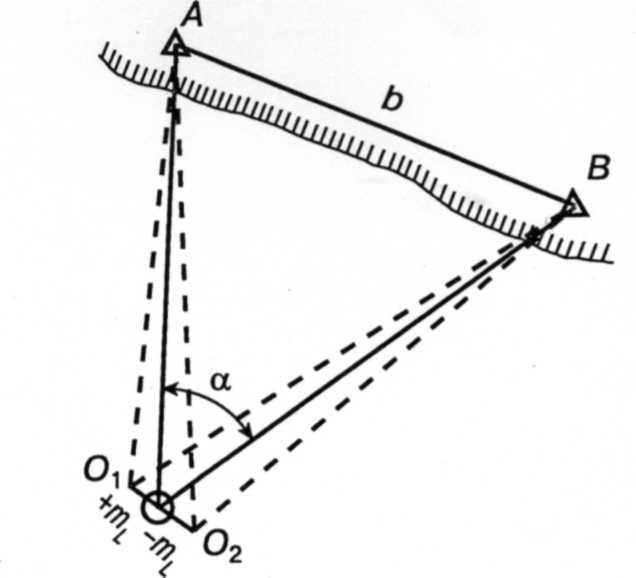
Рис.5.2. Определение места судна по пеленгу и горизонтальному углу
При применении первого способа используются приемы нанесения на карту навигационных изолиний, рассмотренных в главе 2.
При применении второго способа рассчитывается обратный истинный пеленг не наблюдаемого в пеленгатор ориентира
ОИП2= ОИП1 + . (5.3)
Формула (5.3) алгебраическая. В нее угол входит со своим знаком, который определяется положением не наблюдаемого в пеленгатор ориентира относительно линии пеленга наблюдаемого ориентира ("+", если второй ориентир находится справа от линии пеленга первого ориентира; "-", если — слева).
Третий способ получения места на морской навигационной карте предусматривает следующие действия:
на кальку наносятся две прямые, пересекающиеся под углом, равным суммарному горизонтальному углу ;
на карту наносится линия обратного истинного пеленга наблюдаемого ориентира;
калька накладывается на карту так, чтобы вершина горизонтального угла помещалась на линии ОИП;
перемещением вершины горизонтального угла по линии ОИП добиваются такого ее положения, при котором лучи, образующие угол, проходят через первый и второй ориентиры; вершина угла — обсервованное место.
Точность способа. Точность обсервованного места зависит как от точности пеленгования, так и от точности измерения горизонтального угла.
Смещение изоазимуты nп, обусловленное случайной погрешностью пеленга δп, значительно больше смещения Δnα, обусловленного случайной погрешностью δα. Поэтому смещением изогоны па можно пренебречь, а точность обсервованного места оценивать линейным средним квадратическим смещением тL (см. рис. 5.2).
Модуль этого смещения может быть рассчитан по формуле:
![]() (5.4)
(5.4)
где b - расстояние между ориентирами.
Направление смещения тL относительно линии обратного истинного пеленга рассчитывается по формуле
![]() (5.5)
(5.5)
где D1 и D2 - расстояния до первого (пеленгуемого) и второго ориентиров соответственно.
Наиболее просто величина и направление линейного смещения определяются графически: сначала обе линии пеленгов изменяются на величину +тL и находится точка O1, а затем — на величину — тL и находится точка O2. Отрезок О1O2 = 2тL является отрезком, в пределах которого находится истинное место судна (с вероятностью 0,39). Изменяя направление пеленгов на ±3тL, получим отрезок, в пределах которого находится истинное место с вероятностью 0,99. Линейное распределение погрешностей места дает более определенную информацию об истинном месте судна, чем круговое. Поэтому способ определения места по пеленгу и горизонтальному углу более предпочтителен по сравнению со способом двух пеленгов, особенно при α < 90°. Его удобно использовать, когда требуется знать направление вероятного распределения погрешностей места.
Ориентировочная (загрубленная) оценка точности места может производиться с помощью РСКП (М0 = тL). В судовом журнале делается запись:
17.35. ол = 34,8 МКА - 58°,4 (К- 0,6), МКА - 43°,09,7' - 3НКВ, (i+s) = 01,2', С=36° - 2,3 мили.