

Схемы включения ип.
Основными
дифференциальными схемами включения
ИП являются мостовые схемы (см. рис.),
где
![]() и
и
![]() – полные сопротивления секций ИП.
Сопротивления других плеч могут быть
как активными, так и реактивными.
– полные сопротивления секций ИП.
Сопротивления других плеч могут быть
как активными, так и реактивными.

В качестве этих плеч могут служит секции двухобмоточного дросселя (рис. в) или трансформатора с двухсекционной первичной обмоткой (рис. г). Источник питания U и нагрузка Rн могут меняться местами (рис. а и б), при этом чувствительность моста также изменяется.
Мостовые схемы проектируют таким образом, что напряжение на измерительной диагонали URн отсутствует, если на дифференциальном ИП не воздействует входная величина и его якорь находится в среднем положении.
При этом сопротивления
плеч
![]() и
и
![]() равны между собой, их значения принимаем
за
равны между собой, их значения принимаем
за
![]() .
При перемещении якоря сопротивление
одной секции становится
.
При перемещении якоря сопротивление
одной секции становится![]() , а сопротивление другой –
, а сопротивление другой –
![]() .
При этом
.
При этом
![]() ,
а
,
а
![]() ,
и в общем случае они не равны между собой
в силу нелинейности функции преобразования.
,
и в общем случае они не равны между собой
в силу нелинейности функции преобразования.
Однако, если
перемещения якоря мало, то различие
между
![]() и
и
![]() незначительно и может принять
незначительно и может принять
![]() .
.
В этом случае можно
считать, что напряжение URн
изменяется пропорционально
![]() .
Тогда функция преобразования мостовой
схемы будет характеризоваться только
чувствительностью:
.
Тогда функция преобразования мостовой
схемы будет характеризоваться только
чувствительностью:
![]()
Погрешность индуктивных преобразователей.
Температурная
погрешность индуктивных преобразователей
в основном связана с изменением активной
составляющей их сопротивления. Эта
погрешность аддитивна и уменьшается в
случае применения мостовых схем. Также
при изменении Т0С изменяется
![]() (магнитная проницаемость стали), что
приводит к некоторому дополнительному
изменению аддитивной и мультипликативной
погрешностей.
(магнитная проницаемость стали), что
приводит к некоторому дополнительному
изменению аддитивной и мультипликативной
погрешностей.
При изменении Uи.п. меняется магнитопровода ИП и, следовательно, его Z и S. Изменяется также Sсхемы схемы. Изменение Z приводит к аддитивной погрешности и компенсируется мостовой цепью. Изменение S создает мультипликативную погрешность. Для ее уменьшения или стабилизируют Uи.п., или применяют компенсационные схемы измерения.
Изменения питающего напряжения влияет на Sсхемы.
Одна из причин погрешности моста заключается в том, что в питающем напряжении помимо напряжения с основной частотой имеются гармонии с кратными частотами и с частотой промышленной сети. Реальный мост переменного тока, питающийся таким напряжением, полностью сбалансировать трудно, вследствие наличия несбалансированных составляющих с частотами, отличными от основной.
Трансформаторные преобразователи (тп) Принцип действия и конструкция.
ТП представляет собой Tр, у которого под влиянием входного сигнала изменяется взаимная индуктивность М, что приводит к изменению вторичного выходного напряжения.
Различают 2 вида ТП: 1) с изменяющимся магнитным сопротивлением Rм;
2_ с постоянным Rм и подвижной обмоткой.7
Т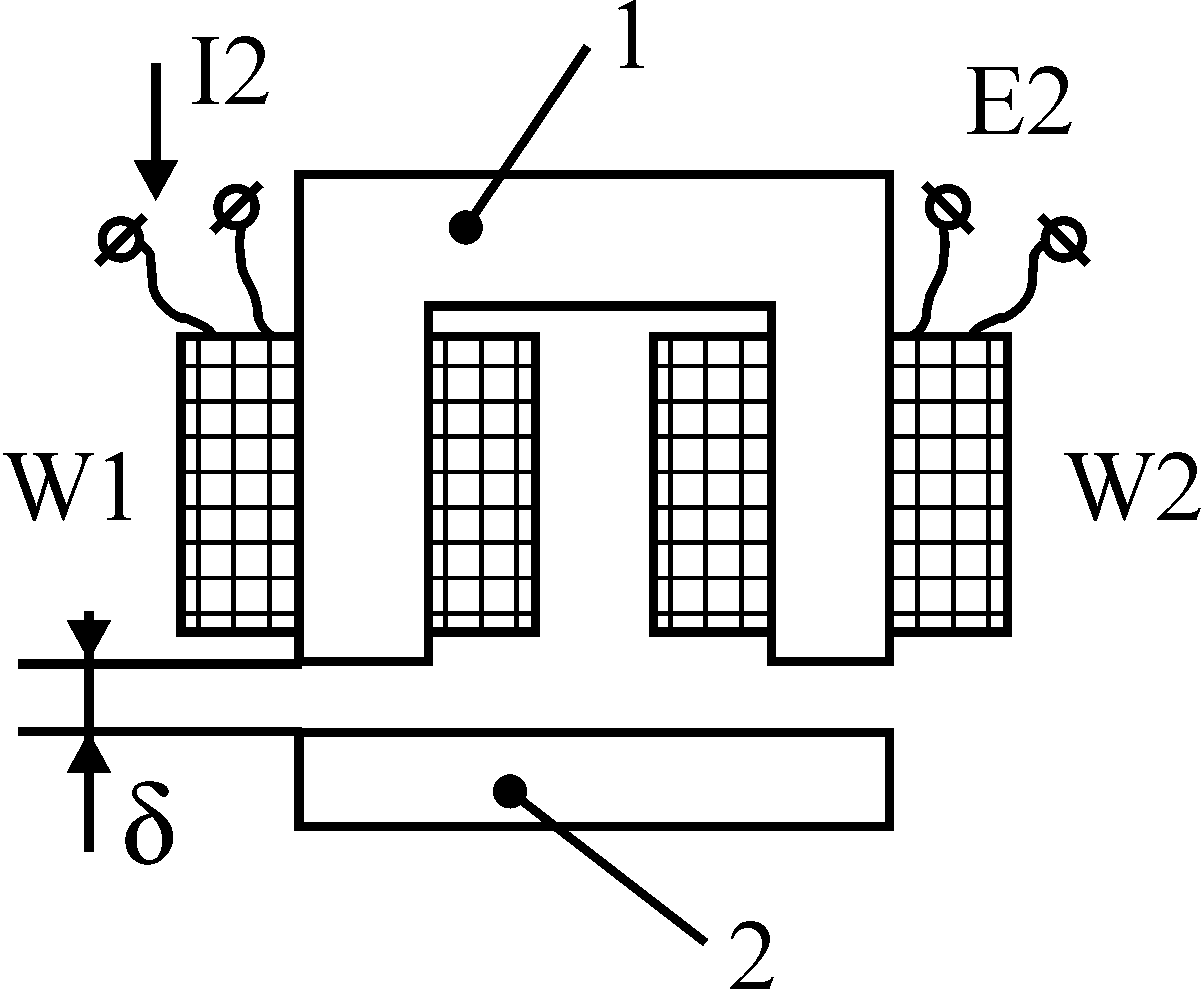
 П
первого рода конструктивно аналогичны
индуктивным преобразователям, но вместо
одной имеют две обмотки (см. рис. а).
П
первого рода конструктивно аналогичны
индуктивным преобразователям, но вместо
одной имеют две обмотки (см. рис. а).
Такой ТП (см. рис.
а) состоит из П-образного магнитопровода
1 и подвижного якоря 2 и двух обмоток W1
и W2. При изменении
воздушного заряда
изменяются Rм и M.
При этом изменяется вторичная ЭДС:
![]() .
.
Как известно,
коэффициент взаимоиндуктивности
представляет собой коэффициент
пропорциональности между потокосцеплением
вторичной обмотки
![]() и током первичной обмотки I1:
и током первичной обмотки I1:
![]() .
.
Ток катушки возбуждения I1 связан с ее МДС F1 по закону полного тока: I1=F1/W1.
Следовательно
![]() ,
где
,
где
![]() – взаимное магнитное сопротивление.
– взаимное магнитное сопротивление.
Если рассеяние
магнитного потока мало и можно считать,
что
![]() ,
то
,
то
![]() ,
следовательно,
,
следовательно,
![]() .
.
Магнитная цепь ТП
аналогична магнитной цепи индуктивного
преобразователя, поэтому можем получить
его функцию преобразования
![]() :
:
![]() .
.
По этому выражению можно определить E2, если ток возбуждения I2 не зависит от перемещения якоря. Однако, если преобразователь подключить к источнику Uconst=U1, то при уменьшении δ возрастает индуктивность первичной обмотки L1 и сопротивление первичной цепи jwL1, что ведет к уменьшению тока I1 и вторичной ЭДС E2. Она будет меньше, чем получится по формуле.
Большей стабильностью первичного тока обладает дифференциальный ТП (рис. б). У этого ТП первичные обмотки соединены последовательно и подключены к источнику переменного напряжения U1, а вторичные обмотки включены встречно.
Можно считать, что
дифференциальный ТП состоит из двух
одинарных. При перемещении якоря
сопротивление первичной обмотки
![]() одного ТП возрастает, а другого
– примерно на столько уменьшается. В
целом сопротивление первичной обмотки
остается почти без изменений, а ток I1
– постоянным:
одного ТП возрастает, а другого
– примерно на столько уменьшается. В
целом сопротивление первичной обмотки
остается почти без изменений, а ток I1
– постоянным:
![]()
ЭДС дифференцирования ТП равна разности ЭДС одинарных ТП: E2=E21-E22.
А функция
преобразования определяется как:
![]() ,
где
,
где
![]() – смещение якоря относительно его
среднего положения.
– смещение якоря относительно его
среднего положения.
Чувствительность
преобразователя:
![]() ,
т. е. пропорциональна питающему напряжению.
,
т. е. пропорциональна питающему напряжению.
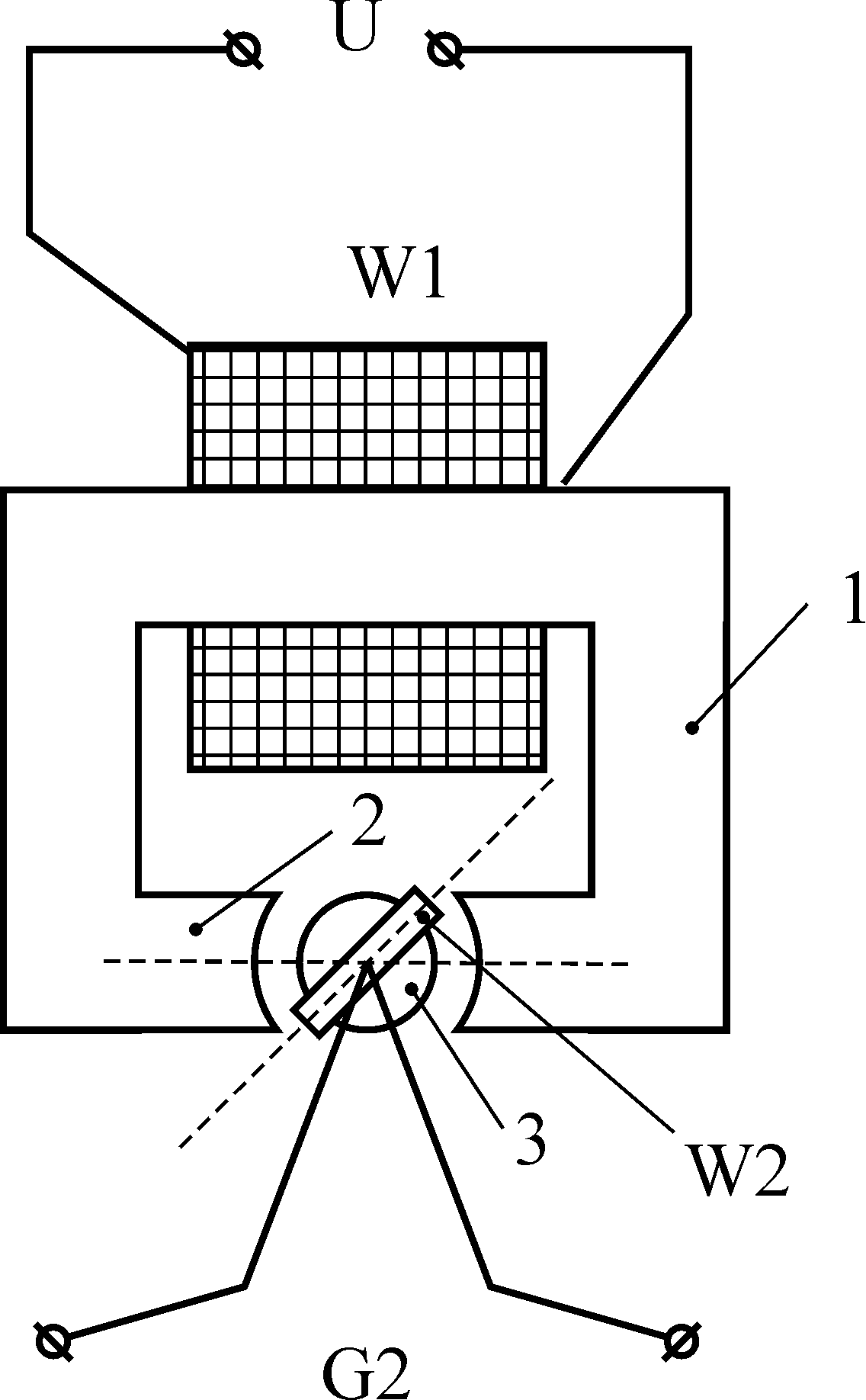
К ТП с постоянным магнитным сопротивлением и подвижной обмоткой относятся ферродинамические ТП и вращающиеся трансформаторы (рис. в).
Он состоит из П-образного магнитопровода 1 с полюсными наконечниками 2. На магнитопроводе помещена обмотка возбуждения W1. Вторичная подвижная обмотка W2 помещена между полюсными наконечниками. Внутри обмотки W2 для уменьшения Rм вставляется цилиндрический ферромагнитный сердечник 3.
Обмотка W1 включается в цепь переменного напряжения, имеющего частоту w, и создается магнитный поток. Часть его проходит через обмотку W2 и наводит в ней ЭДС E2. При повороте обмотки наведенная ЭДС изменяется.
Погрешность ТП.
Причины погрешностей ТП с изменяющимся Rм аналогичны причинам погрешностей индуктивных преобразователей. Аддитивные погрешности значительно уменьшаются при использовании дифференциальных преобразователей.
Все ТП имеют также специфические причины погрешностей, обусловленные протеканием тока во вторичных обмотках и изменением их сопротивления. Это мультипликативные погрешности, уменьшающиеся с уменьшением тока, потребляемого вторичным преобразователем.
Изменение температуры ТП вызывает изменение ЭДС E2. При увеличении температуры возрастает активное сопротивление первичных обмоток и соответственно их импеданс. Это уменьшает первичный ток I1 и ЭДС E2.