

Принцип действия пьезоэлектрического преобразователя.
Действие ПП основано на прямом пьезоэффекте. ПП представляет собой пластину, изготовленную из пьезоэлектричекого материала, на которой есть 2 изолированных друг от друга электрода.
В зависимости от вещества, формы ПП и ориентации кристаллических осей входной величиной могут быть силы, производящие деформацию сжатия, растяжения и деформацию сдвига (т. е. входная величина – момент силы).
Выходной величиной
ПП является напряжение на электродах:
![]() ,
где q – пьезоэлектрический
заряд; C – емкость,
образованная электродами; или
,
где q – пьезоэлектрический
заряд; C – емкость,
образованная электродами; или
![]() ,
если
,
если
![]() ,
то
,
то
![]() – функция преобразования.
– функция преобразования.
Здесь Q – площадь электродов; – расстояние между электродами; – относительная диэлектрическая проницаемость пьезоэлектрика.
ЭДС, возникающая на электродах – единицы вольт.
Если действующая
сила постоянна, то измерить ЭДС трудно,
так как заряд мал и быстро стекает через
входное сопротивление вольтметра. Если
входное воздействие переменное, то
образуется переменная ЭДС, которую
измерить значительно проще. Если период
изменения силы меньше постоянной времени
![]() ,
определяемой емкостью C
ПП и сопротивление и утечки заряда, то
процесс утечки не влияет на выходное
напряжение
,
определяемой емкостью C
ПП и сопротивление и утечки заряда, то
процесс утечки не влияет на выходное
напряжение
![]() ПП.
ПП.
Схема включения.
ПП является генераторным преобразователем, вырабатывающим ЭДС. Для преобразования ее в датчике имеется вторичный преобразователь, в качестве которого может использоваться вольтметр ~ тока (электронный вольтметр).
На упрощенной эквивалентной схеме ПП:
C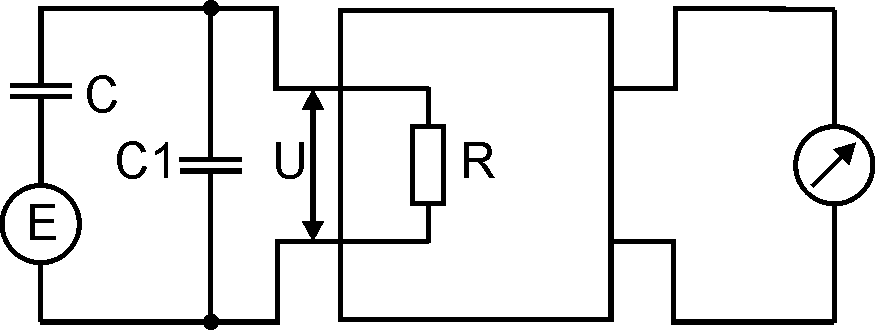 – собственная емкость ПП;
– собственная емкость ПП;
C1 – суммарная емкость соединительного кабеля, входная емкость усилителя и др.;
R – входное сопротивление усилителя;
U – входное напряжение усилителя, падающее на R.
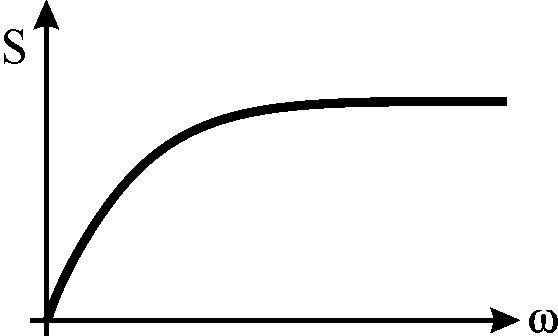 Рабочей
областью частот является область, в
которой чувствительность S=const.
Сверху эта область ограничена резонансом
пьезоэлемента. Снизу она определяется
постоянной времени
.
Рабочей
областью частот является область, в
которой чувствительность S=const.
Сверху эта область ограничена резонансом
пьезоэлемента. Снизу она определяется
постоянной времени
.
Индуктивные преобразователи (ип)
Принцип действия и конструкция. ИП – это катушка индуктивности (дроссель), полное сопротивление которой изменяется при взаимном относительном перемещении элементов магнитопровода. две группы ИП:
1) с изменяющейся индуктивностью L;
2) с изменяющимся активным сопротивлением R.
ИП с изменяющимся L.
1 – магнитопровод;
2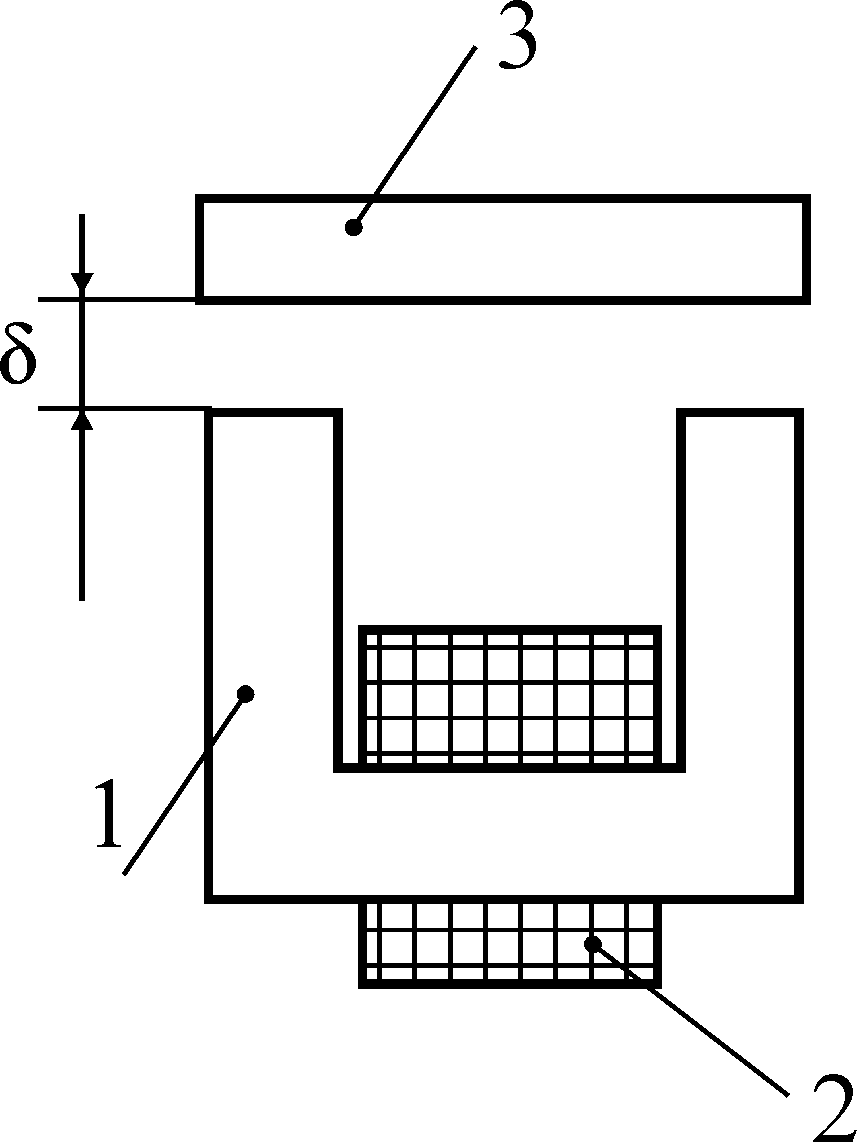 – катушка;
– катушка;
3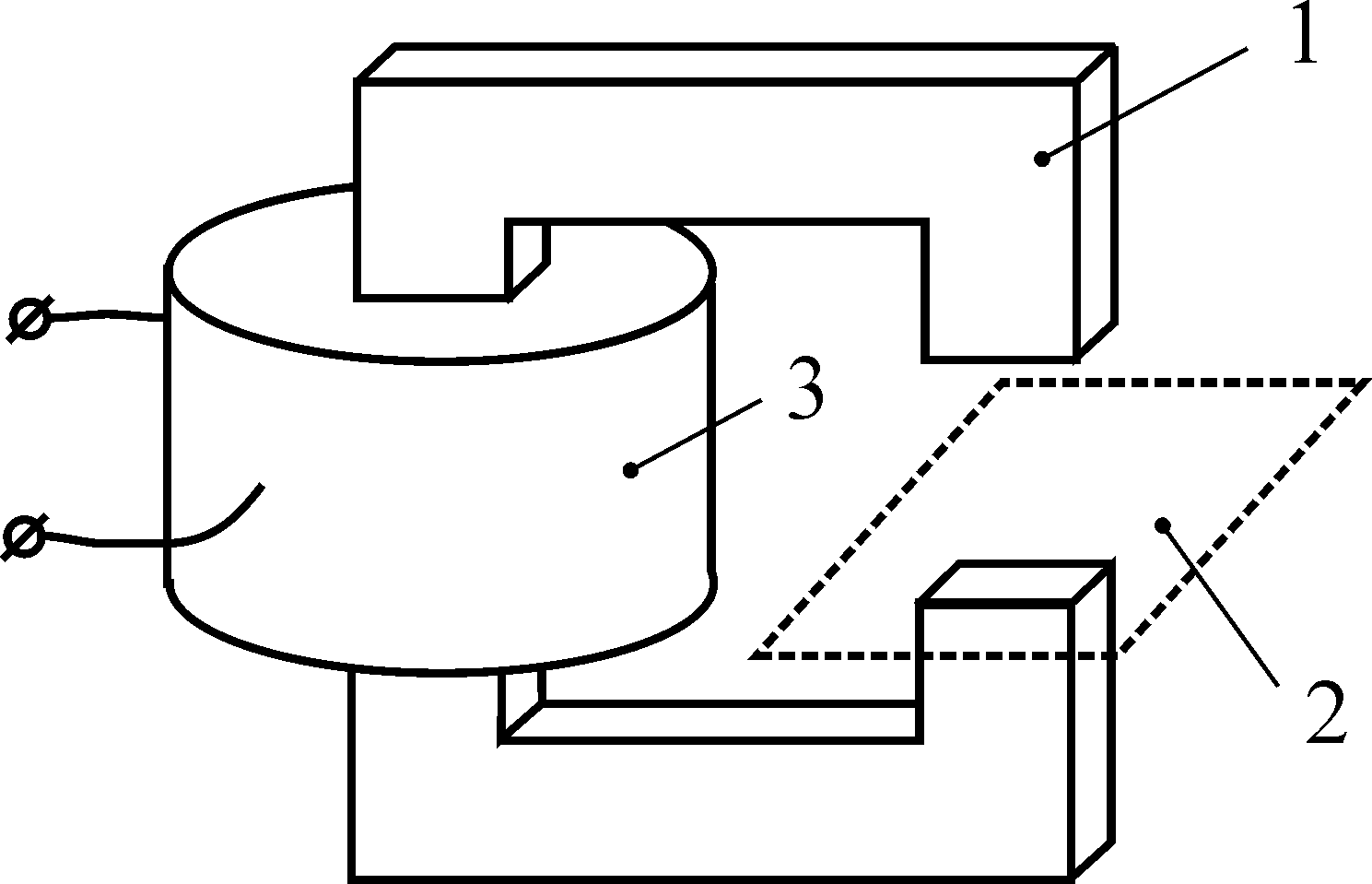
 – подвижный якорь.
– подвижный якорь.
1 – катушка;
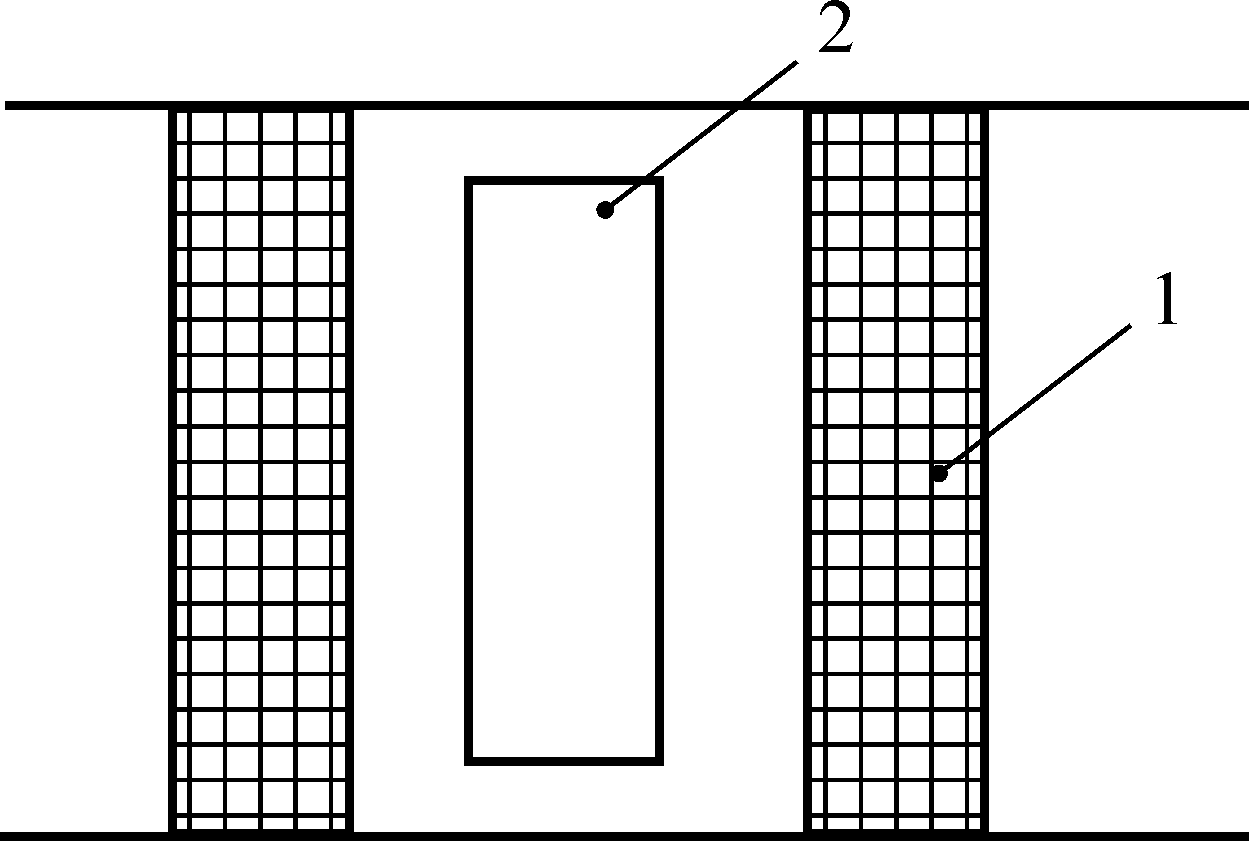
2 – подвижный ферромагнитный сердечник (плунжер).
ИП с изменяющимся R.
1 – магнитопровод;
2 – пластинка;
3 – катушка.
В первом случае: ИП состоит из П-образного магнитопровода 1 (рис. а), на котором находится катушка 2 и подвижного якоря 3. При перемещении якоря изменяется длина воздушного зазора и, следовательно, магнитное сопротивление Rm, что вызывает изменение L дросселя.
Плунжерный преобразователь представляет собой катушку 1, из которой может выдвигаться плунжер 2. При среднем положении плунжера L максимальна (рис. б).
Во втором случае: ИП состоит из магнитной цепи 1, в зазор которой вводится пластинка 2 с высокой электропроводимостью, в которой наводятся вихревые токи, приводящие к увеличению потерь активной мощности катушки 3. Это эквивалентно увеличению ее активного сопротивления.
Функция преобразования ИП на рис. а) может быть получена с учетом некоторых допущений следующим образом.
Известно, что
индуктивность катушки
![]() ,
где
,
где
![]() – число витков,
– число витков,
![]() – пронизывает ее магнитный поток,
– пронизывает ее магнитный поток,
![]() – ток в катушке.
– ток в катушке.
Ток связан с МДС
Hl(F)
соотношением
![]() ,
отсюда
,
отсюда
![]() ,
где
,
где
![]() – магнитное сопротивление ИП.
– магнитное сопротивление ИП.
Магнитное
сопротивление ИП на рис. а) определяют
как Rм=Rст.+Rз,
где Rст – магнитное
сопротивление стали, Rз
– магнитное сопротивление воздушных
зазоров:
![]() ,
где
– длина зазоров;
,
где
– длина зазоров;
Q – их сечение;
![]() – магнитная
постоянная.
– магнитная
постоянная.
Е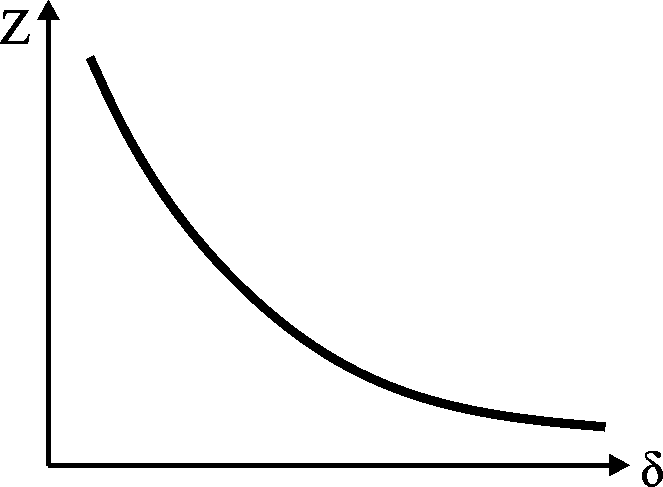 сли
пренебречь активным сопротивлением
дросселя, то функция преобразования,
т. е. зависимость электрического
сопротивления
сли
пренебречь активным сопротивлением
дросселя, то функция преобразования,
т. е. зависимость электрического
сопротивления
![]() от размера воздушного зазора
определяется таким образом:
от размера воздушного зазора
определяется таким образом:![]() ,
что соответствует графику:
,
что соответствует графику:
Под чувствительностью
ИП часто понимают отношение:![]() ,
таким образом
,
таким образом
![]() .
.
Индуктивный преобразователь является электромагнитом, его сила притяжения, возрастающая с увеличением чувствительности, нелинейно зависит от перемещения якоря и может являться причиной погрешности преобразователя, предшествующим индуктивному.
О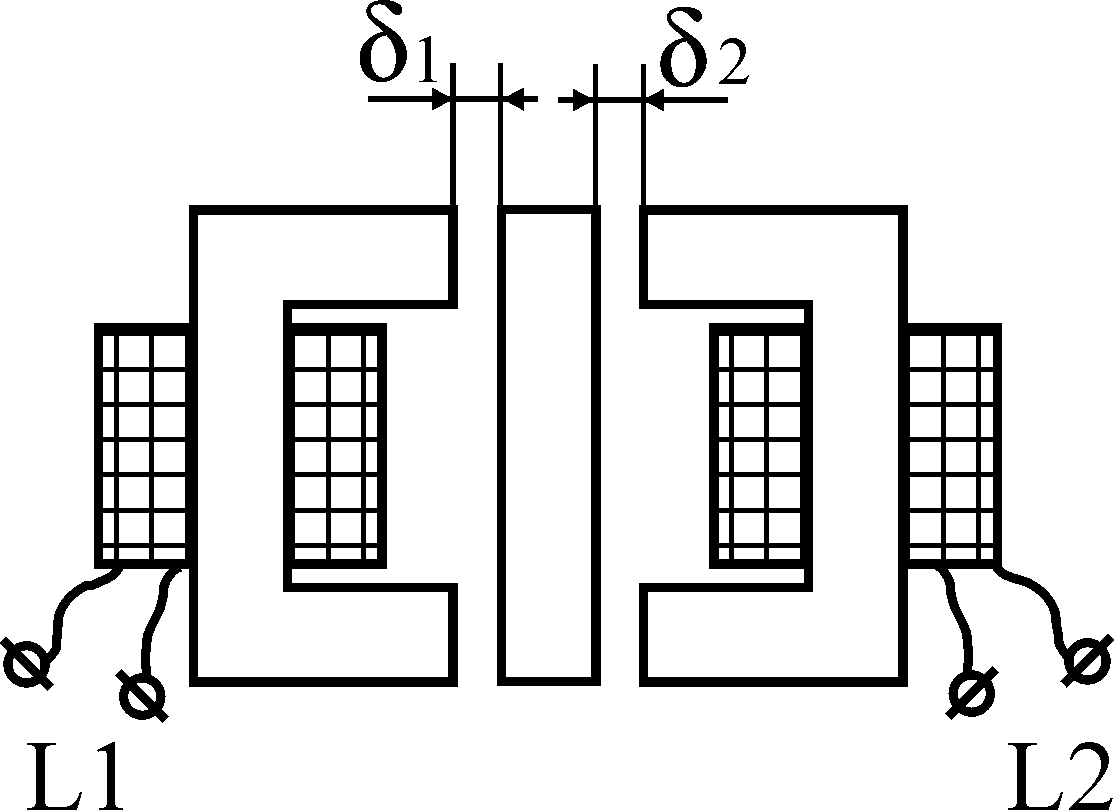
 динарные
ИП имеют недостатки: нелинейность
функции преобразования; аддитивная
погрешность, вызванная температурным
изменением активного сопротивления
обмотки, велика; значительная сила
притяжения якоря.
динарные
ИП имеют недостатки: нелинейность
функции преобразования; аддитивная
погрешность, вызванная температурным
изменением активного сопротивления
обмотки, велика; значительная сила
притяжения якоря.
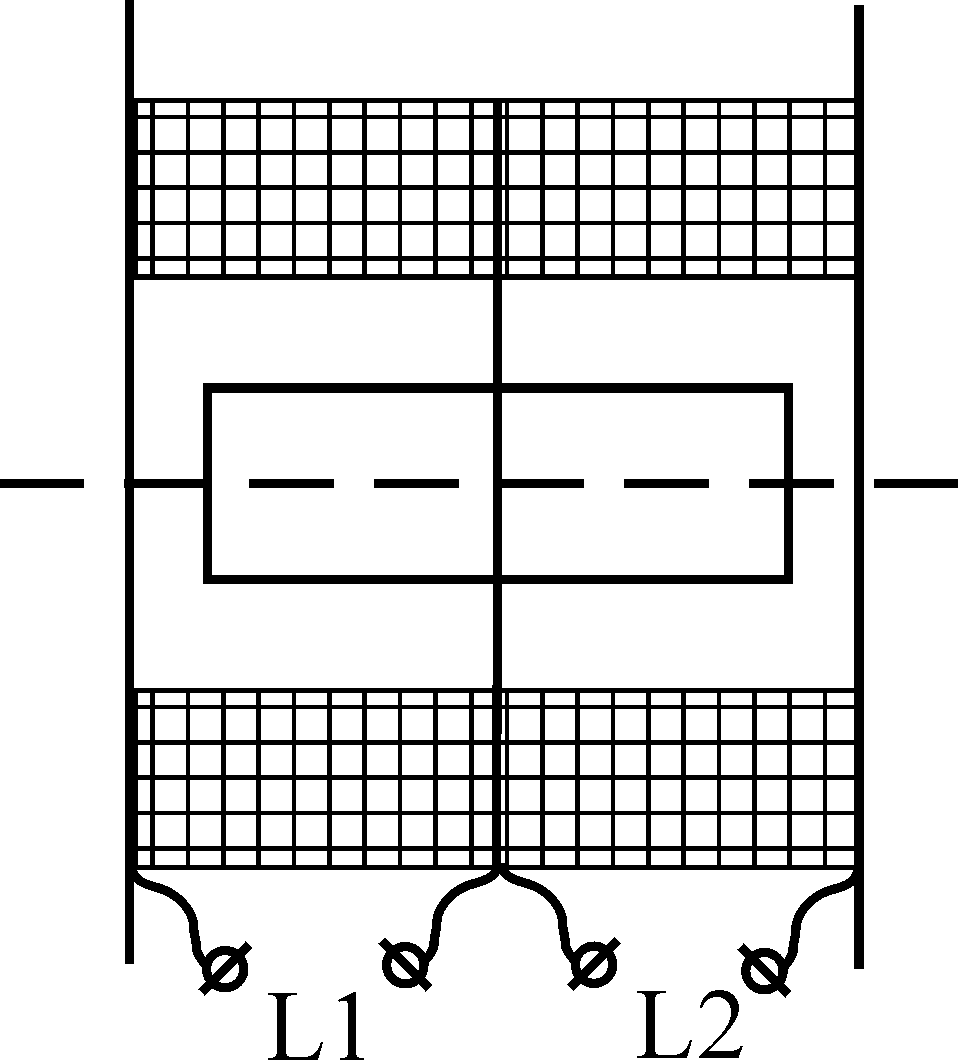
Этих недостатков лишены дифференциальные преобразователи. Они состоят из двух одинаковых одинарных ИП, которые имеют общий подвижный элемент (см. рис.). При перемещении якоря одна индуктивность L1 возрастает, а другая L2 – уменьшается.
Дифференциальные ИП включаются в дифференциальные цепи, что уменьшает аддитивную погрешность, улучшает линейность функции преобразования, в 2 раза возрастает чувствительность и уменьшается сила притяжения якоря.