

Виды погрешности.
Абсолютная погрешность ИП
![]() ,
,
![]()
где
![]() — реальное значение измеряемой величины;
— реальное значение измеряемой величины;
![]() — номинальное
значение по номинальной функции
преобразователей.
— номинальное
значение по номинальной функции
преобразователей.
Однако, так как
истинное значение неизвестно, на практике
вместо него используется действительное
значение
![]() ,
в качестве которого принимают показания
более точно, образцового преобразователя.
,
в качестве которого принимают показания
более точно, образцового преобразователя.
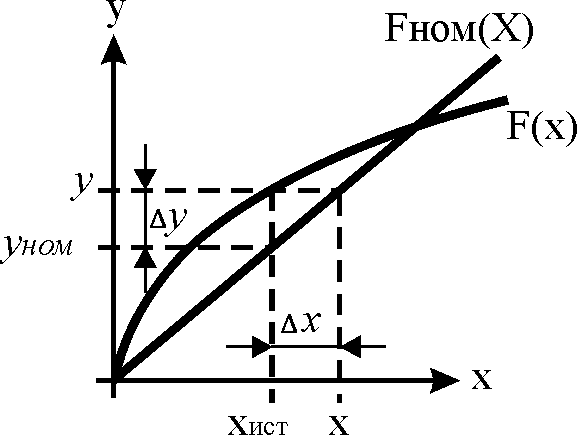
Относительная погрешность:
по входу
![]() ;
;
по выходу
![]() .
.
Приведенная
погрешность
![]() ,
где
,
где
![]() — нормирующее значение равное верхнему
пределу измерений (если отсчет идет от
нуля) или диапазону измерений
— нормирующее значение равное верхнему
пределу измерений (если отсчет идет от
нуля) или диапазону измерений
![]() ;
;
![]() .
.
В технике часто
используются ИП с линейной функцией
преобразования:
![]() ,
,
где
![]() —чувствительность,
—чувствительность,
![]() — значение выходной
величины при
— значение выходной
величины при
![]() .
Отклонение такой функции от номинальной
может быть вызвано отклонением
и
.
.
Отклонение такой функции от номинальной
может быть вызвано отклонением
и
.
«Уход 0» формирует аддитивную погрешность, неноминальная чувствительность вызывает мультипликативную погрешность.
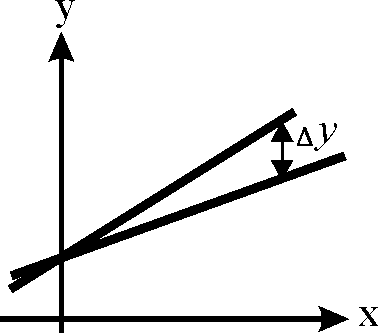 А
А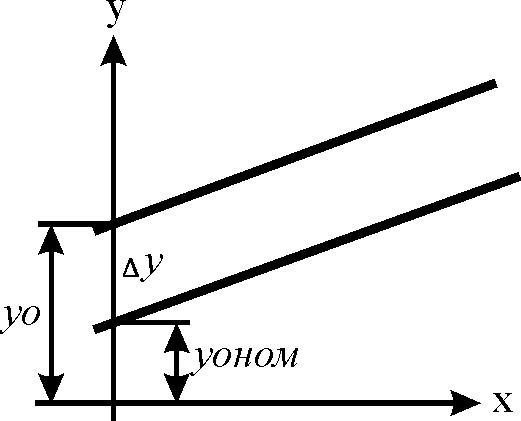 бсолютная
погрешность
бсолютная
погрешность
![]()
Аддитивная погрешность не зависит от входной величины х.
В зависимости от условий проведения измерений различают основную и дополнительные погрешности.
Основная погрешность — это погрешность существования в нормальных условиях.
Дополнительная погрешность – возникает при проведении измерений в условиях отличных от нормальных условий.
Нормирование погрешности производится по максимально допустимым значениям основной и дополнительной погрешностей. При этом погрешность не должна превышать одного из перечисленных ниже пределов.
а) если погрешность
имеет аддитивный характер, то
![]() ;
;
б) если погрешность
имеет аддитивный и мультипликативную
составляющую, то
![]() ;
;
в) если погрешность
имеет мультипликативный характер, то
![]() ;
;
г) если погрешность
имеет как аддитивную и мультипликативную
составляющую, то
 ,
,
где
![]() ,
,
![]() —
конечное значение
диапазона измерения;
—
конечное значение
диапазона измерения;
д) приведена
погрешность
![]() .
.
Постоянные
![]() выбираются из следующего ряда чисел
выбираются из следующего ряда чисел
![]()
где
![]() и т.д.
и т.д.
Класс точности
– это обобщенная метрологическая
характеристика, определяемая пределами
допускаемых основной и дополнительных
погрешностей в виде дроби
![]() .
.
Отдельными характеристиками погрешности являются вариации показаний (гистерезис) и порог чувствительности.
Порог чувствительности – это изменение измеряемой величины вызывающее наименьшее изменение выходной величины, различимое для данного ИП.
К метрологическим характеристикам ИП относятся динамические характеристики, т. е. характеристики инерционных свойств ИП, определяющие зависимость выходного сигнала ИП от меняющихся во времени величин: параметров входного сигнала, внешних влияющих величин, нагрузки.
К полным динамическим характеристикам относят переходную характеристику, импульсную переходную характеристику, амплитудно-фазовую характеристику, совокупность АЧХ ФЧХ, передаточную функцию.
Частная динамическая
характеристика не отражает полностью
динамических свойств ИП. К ним относят
любые функционалы или параметры полных
динамических характеристик. Например,
время реакции (т.е. время установления
выходного сигнала, быстродействие ИП),
коэффициент демпфирования (степень
успокоения), значение
![]() собственной угловой частоты, значение
АЧХ на
.
собственной угловой частоты, значение
АЧХ на
.