

Трансформаторные преобразователи
Принцип действия и конструкция. Трансформаторный преобразователь представляет собой трансформатор, у которого под влиянием входного сигнала изменяется взаимная индуктивность, что приводит к изменению вторичного, выходного напряжения.
Различают два вида трансформаторных преобразователей: с изменяющимся магнитным сопротивлением и с постоянным магнитным сопротивлением и подвижной обмоткой.
Преобразователи первого вида конструктивно аналогичны индуктивным преобразователям и отличаются тем, что вместо одной имеют две обмотки. Так, например, преобразователь (Рис. 7.10, а) состоит из П-образного магнитопровода 1, подвижного якоря 2 и двух обмоток w1 и w2. При изменении воздушного зазора изменяются магнитное сопротивление RM и взаимная индуктивность M. При этом изменяется вторичная ЭДС E2.
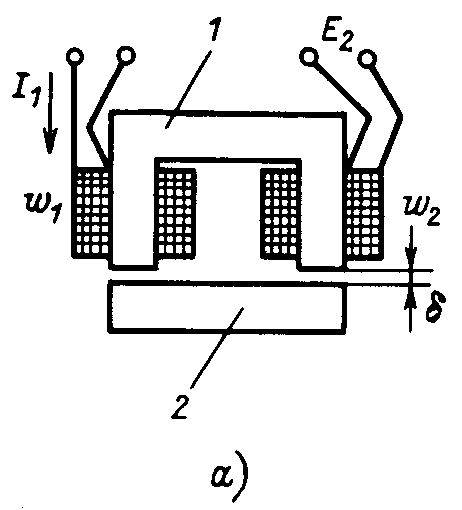

Рис. 7.10. Трансформаторные преобразователи
К преобразователям с постоянным магнитным сопротивлением и подвижной обмоткой относятся ферродинамические трансформаторные преобразователи и вращающиеся трансформаторы.
Схема ферродинамического преобразователя угла поворота приведена на Рис. 7.10, б. Он состоит из П-образного магнитопровода 1 с полюсными наконечниками 2. На магнитопроводе помещена обмотка возбуждения w1. Вторичная подвижная обмотка w2 помещена между полюсными наконечниками. Внутри обмотки w2 для уменьшения магнитного сопротивления вставляется цилиндрический ферромагнитный сердечник 3. Воздушный зазор между сердечником и полюсными наконечниками одинаков, также одинакова в воздушном зазоре и магнитная индукция.
Обмотка w1,
включается в цепь переменного напряжения,
имеющего частоту
![]() ,
и создает магнитный поток. Часть его
проходит через обмотку и наводит в ней
ЭДС Е2.
При повороте обмотки наведенная ЭДС
изменяется.
,
и создает магнитный поток. Часть его
проходит через обмотку и наводит в ней
ЭДС Е2.
При повороте обмотки наведенная ЭДС
изменяется.
Индукционные преобразователи
Индукционным
преобразователем
называется преобразователь, принцип
действия которого основан на законе
электромагнитной индукции. Преобразователь
имеет катушку. При воздействии входной
величины на преобразователь изменяется
потокосцепление
![]() катушки с внешним по отношению к катушке
магнитным полем. При этом в катушке
наводится ЭДС:
катушки с внешним по отношению к катушке
магнитным полем. При этом в катушке
наводится ЭДС:
|
(7.0) |
Потокосцепление
|
(7.0) |
где w – число витков катушки; Ф – проходящий через нее поток; Q – площадь, через которую проходит этот поток; В – индукция магнитного поля.
ЭДС в катушке может наводиться при изменении во времени любой из перечисленных величин w, В, Q.
В качестве примера рассмотрим преобразователь, который представляет собой магнитную систему с постоянным магнитом, в воздушном зазоре которой перемещается катушка (Рис. 7.11).

Рис. 7.11. Пример индукционного преобразователя
При движении
катушки с изменением x изменяется
площадь катушки, находящейся в магнитном
поле,
.
Это приводит к изменению потокосцепления
![]() ,
и в катушке наводится ЭДС
,
и в катушке наводится ЭДС
|
(7.0) |
Индукционные
преобразователи служат для преобразования
линейной
![]() или угловой
или угловой
![]() скорости перемещения катушки относительно
магнитного поля в ЭДС. Они являются
генераторными преобразователями и
преобразуют механическую энергию в
электрическую.
скорости перемещения катушки относительно
магнитного поля в ЭДС. Они являются
генераторными преобразователями и
преобразуют механическую энергию в
электрическую.