

Датчики.
Предназначены для выработки стабилизирующих сигналов. Основные типы датчиков:
Датчики угловых отклонений ЛА относительно не вращающихся СК. Выполняются на основе позиционных гироскопов.
Принцип действия основан на устойчивости напряжений его главной оси. Выходное напряжение пропорционально углу отклонение корпуса в гироскопической неподвижной СК.
Датчики угловых скоростей вращения корпуса ЛА строится на основе скорости гироскопов. Напряжение с выхода меняется пропорционально угловой скорости вращения ЛА. Линейное ускорение изменяется с помощью датчиков – аксилирометров. С их помощью можно измерить и угол атаки, и угол скольжения. Иногда для измерения углов атаки и скольжения используются флюгерные датчики.
Контур стабилизации крена.

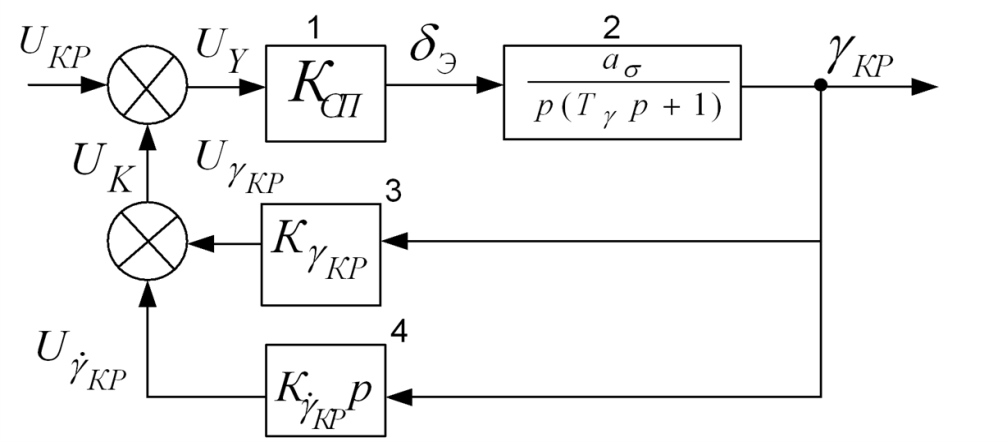
1 – силовой привод с коэффициентом передачи;
2 – структурная схема, описывающая движение ЛА по крену;
3 – позиционный гироскоп;
4 – скоростной гироскоп;
![]() -
угол отклонения элеронов;
-
угол отклонения элеронов;
Uкр – команды на крен;
Kсп – коэффициент передачи силового привода;
![]() – угол крена ЛА;
– угол крена ЛА;
Т![]() – характеризует аэродинамическую
постоянную по крену;
– характеризует аэродинамическую
постоянную по крену;
![]() – связано с моментом оси
снаряда вокруг оси Х.
– связано с моментом оси
снаряда вокруг оси Х.
При появлении крена на выходном позиционном гироскопе формируется напряжение. Оно с отрицательным знаком суммируется с командным сигналом. В результате формируется управляющий сигнал Uу. СП полагается безынерциальным звеном. Под действием Uу элероны отклонятся на некоторый угол. Если вычислить передаточную функцию такой системы, то получим колебательное звено. Установившийся угол крена будет пропорционален и командному сигналу. Коэффициент демпфирования будет очень мал. Для получения оптимального коэффициента демпфирования используется скоростной гироскоп. С его выхода снимается сигнал, пропорциональный угловой скорости вращения корпуса ЛА. В результате мы увеличиваем коэффициент демпфирования. Контур стабилизации по крену для плоскости крестокрылых снарядов одинаков. Единственное отличие – команда по крену для крестокрылого аппарата раняется 0.
Контур стабилизации летательного аппарата по курсу.

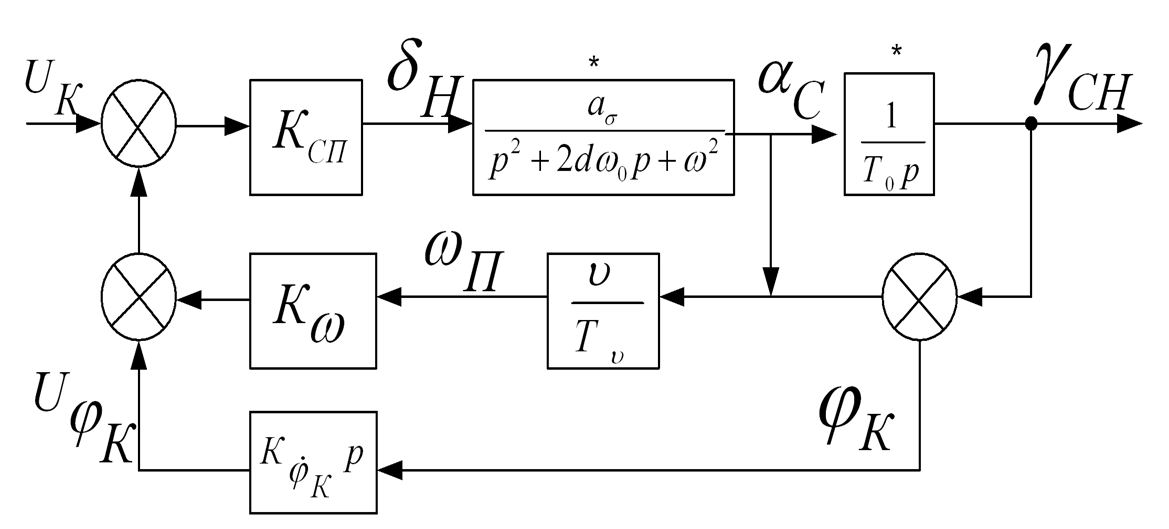
*- структурная схема, которая отображает движение крестокрылого снаряда в горизонтальной плоскости;
- угол отклонения рулей курса;
К![]() - скоростной гироскоп;
- скоростной гироскоп;
К![]() и
и
![]() -
датчик акселерометр.
-
датчик акселерометр.
В простейшем случае можно подавать командный сигнал на СП непосредственно (без цепей стабилизации). Если СП безынерционный, то угол рулей будет пропорционален командному сигналу. Командному сигналу будут пропорциональны установившиеся сигналы углов скольжения и угла крена. Но есть недостаток – малый коэффициент демпфирования. Для успокоения колебаний снаряда используют гибкую ОС. Для этой цели служит гироскопический датчик. С его выходной стабилизацией сигнал алгебраически суммируется с командным сигналом.
Применение скоростного
гироскопа, сигнал на выходе которого
пропорциональный производной угла
![]() ,
то есть производная от угла поворота
продольной оси снаряда, не позволяет
полностью решить задачу по получению
оптимального коэффициента демпфирования.
Поэтому в цепь ОС вводят датчик-аксилирометр.
На выходе датчика формируется напряжение,
которое пропорционально скорости
изменения угла
,
то есть в конечном итоге мы следим за
угловыми скоростями и курсом угла
и угла скольжения.
,
то есть производная от угла поворота
продольной оси снаряда, не позволяет
полностью решить задачу по получению
оптимального коэффициента демпфирования.
Поэтому в цепь ОС вводят датчик-аксилирометр.
На выходе датчика формируется напряжение,
которое пропорционально скорости
изменения угла
,
то есть в конечном итоге мы следим за
угловыми скоростями и курсом угла
и угла скольжения.