

Система наведения с силовым флюгером.

СП – силовой привод
ДУА – датчик угла антенн
цель
Антенна визира закреплена на подвижной платформе. Ось платформы ориентирована по вектору скорости снаряда. Датчик угла скольжения связан с флюгером. Флюгер всегда направлен вдоль вектора скорости. С выхода флюгерного датчика снимается напряжение, пропорциональное углу скольжения. Датчик подает напряжение, пропорциональное углу αА – угол поворота антенной платформы относительно корпуса снаряда. Сумма этих напряжений подается на СП и антенная платформа разворачивается, стремясь к условию αС < αА (условие совпадения антенны с вектором скорости).
Головки самонаведения для быстро движущихся целей.

Применяют метод пропорционального сближения
![]()
A – навигационная постоянная.
Требуется решение следующих задач:
Направить максимум ДН на цель
Вырабатывать сигнал рассогласования, из которого формируется сигналы управления
![]()
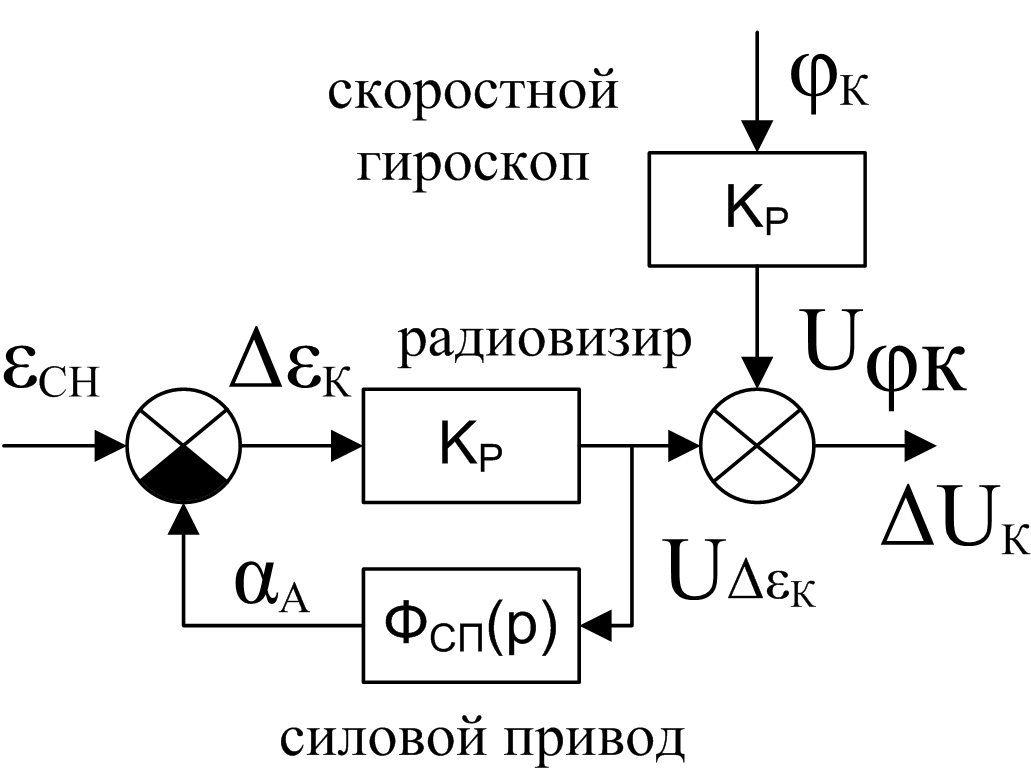
Сигнал рассогласования формируется таким образом, чтобы объект перемещался по следующему закону: в любой момент времени линия визирования должна перемещаться параллельно самой себе. Мы применяем силовой привод без жесткой обратной связи, следовательно, передаточная функция – интегрирующее звено, поэтому система является астатической. Ошибка Δεк астатической системы пропорциональна скорости изменения входной величины, поэтому можно записать:
![]()
Перед стартом мы раскручиваем скоростной гироскоп. С выхода такого датчика снимаем напряжение, пропорциональное углу φк. В результате на выходе сумматора получаем рассогласование:
![]()
![]()
В результате следящая система будет вырабатывать и сигнал рассогласования, и осуществлять разворот антенны таким образом, чтобы линия визирования была направлена на цель.
В реальных системах возникает ошибка слежения, 1 составляющая ошибки: k1=k2, 2 составляющая: в процессе полета снаряд совершает угловые колебания, следовательно, производная угла будет определяться неточно.
Головка самонаведения со следящим гироприводом.

Основной элемент – позиционный гироскоп. Антенна жестко связана с главной осью позиционного гироскопа. При отклонении оси антенны от направления на цель формируется сигнал рассогласования.
U∆ε=kР∆εk
Он подается на электродвигатель, который создает вокруг оси гироскопа с таким моментом:
Mz= ФЭД(р) U∆ε
Под действием приложенного момента ось гироскопа прецессирует таким образом, что угол ∆εk уменьшается. Угловая скорость вращения оси пропорциональна моменту Mz. Так как в контуре содержится интегральное звено, то напряжение на выходе радиовизира будет пропорционально угловой скорости визирования, то есть выходное напряжение радиовизира может использоваться в качестве сигнала рассогласования.
Структурная схема кинематического звена.
Рассмотрим случай самонаведения методом параллельного сближения.
νц

Структурную схему радиозвена можно легко определить. Надо найти структурную схему кинематического звена.
γсн – выходная величина звена автопилот-снаряд;
νц – внешняя динамическая воздушная система управления;
ηr – угловая скорость линии визирования.
Структурная схема кинематического звена будет определена, если мы сумеем определить, как меняется угол ηr при изменении углов νц и γсн.
Будем рассматривать плоскую задачу. Углы νц и γсн малы. Скорость сближения снаряда и цели определяется как проекция векторов Vy и Vсн на линию визирования.
![]()
Vсн и Vц – скорости снаряда и цели.
Минимальная скорость вращения линии визирования определяется через проекции скорости снаряда и цели на нормаль к линии визирования.
![]()
Выражение есть кинематическое уравнение, которое отображает математическую связь между углами γсн, внешним динамическим воздействием и производной линии визирования. Эти уравнения устанавливают связь между выходной величиной звена автопилот снаряд, внешним динамическим воздействием и угловой скоростью линии визирования. Мы будем полагать, что наведение осуществляется на встречных курсах.

![]()
![]()
Можно составить замкнутую структурную схему контура управления. В состав кинематического звена будет входить инерциальное звено и видно, что структурная схема кинематического звена является нестационарной системой.