

-
Построение лачх корректирующего звена, определение его передаточной функции и параметров.
После построения ЛАЧХ неизменяемой части системы Lн(ω) и желаемой ЛАЧХ Lж(ω) ЛАЧХ корректирующего устройства Lк(ω) определятся на основе выражения Lк(ω) = Lж(ω) − Lн(ω) (рис.6).
ЛАЧХ корректирующей цепи Lк(ω) расположена ниже оси абсцисс сплошной линией в виде трапеции HFMK.
Электрическая схема корректирующего звена приведена на рис.7.
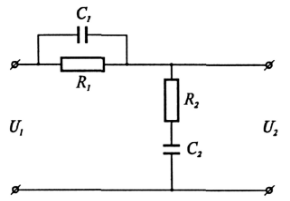
Рис.7. Корректирующее звено.
Для выбранного корректирующего звена передаточная функция:

Значения τ1, τ2, Тa, Тb следует определять по ЛАЧХ корректирующего звена (рис.6).
Для определения параметров элементов корректирующего звена R1, R2, С1, С2 используем независимые уравнения:
![]()
Определим τ1, τ2, Ta, Tb :
 (1/c)
; τ1=1
c.;
(1/c)
; τ1=1
c.;
 (1/c)
; τ2=0,1
c.
(1/c)
; τ2=0,1
c.
 (1/c);
Ta=19,95
c.;
(1/c);
Ta=19,95
c.;
 (1/c);
Tb=0,004
c.
(1/c);
Tb=0,004
c.
Задаваясь
 Ом,
определим R2,
С1,
С2.
Ом,
определим R2,
С1,
С2.



Следует также отметить: при построении желаемой ЛАЧХ предполагалось, что неизменяемая часть системы с усилителем имеет необходимый коэффициент усиления (необходимый передаточный коэффициент). После выбора корректирующего звена, передаточный коэффициент разомкнутой системы, как правило, изменяется. И теперь нужно окончательно определить необходимое значение передаточного коэффициента.
-
Определение передаточной функции разомкнутой и замкнутой скорректированной системы, построение лфчх скорректированной системы.
Передаточная функция разомкнутой скорректированной системы может быть записана следующим образом:


Положим:


Тогда

Передаточная функция замкнутой системы:

Тогда

Произведем перемножение в знаменателе и найдем характеристический полином D(jω).

Подставляем Ty = 0,004 с; Ta =19,95 с; Tb = 0,004 с; τ1 = 1 с; kн = 235,7312.


Подставим p = jω.




-
Построение лфчх скорректированной системы.
Логарифмическая фазо-частотная характеристика (ЛФЧХ) скорректированной САУ строится вместе с ЛАЧХ на основе передаточной функции разомкнутой скорректированной системы:
φск (ω) = – 900 + arctg (τ1ω) – arctg (Tуω) – arctg (Tаω) – arctg (Tbω).
ЛФЧХ строится в градусах.

Рис.8. ЛФЧХ скорректированной системы.
-
Определение переходной функции скорректированной системы.
Вещественную частотную характеристику замкнутой системы получают в виде графика с использованием P-номограммы (рис. 9) на основании ЛАЧХ и ЛФЧХ. Эти номограммы построены на плоскости, по оси абсцисс которой отложены значения φ, а по оси ординат Lm = 20lg A.

Рис.9. Номограмма для определения вещественной частотной характеристики
замкнутой системы
Номограммы представляют собой семейство линий равных значений P(ω). Для определения величины P(ω) откладываются известные значения L(ωi) и φ(ωi) находится точка на плоскости с этими координатами. Индекс кривой P = const, проходящей через эту точку, равен искомому значению P(ωi). Если полученная точка не находится на кривых, то выполняют интерполяцию. При L(ω) > 28 дБ P(ω) ≈ 1, а при L(ω) < -28 дБ P(ω) ≈ 0. Итоговые значения занесены в таблицу 1, график P(ω) представлен на рис.10.
Таблица 1.
|
ω, с-1 |
lg ω |
Lm(ω), дБ |
φ (ω), град |
P(ω) |
|
0,6918 |
-0,16 |
28 |
-145 |
1,031 |
|
0,8709 |
-0,06 |
24 |
-141 |
1,050 |
|
1,0965 |
0,04 |
20 |
-136 |
1,074 |
|
1,5136 |
0,18 |
16 |
-130 |
1,080 |
|
2,1988 |
0,38 |
12 |
-125 |
1,090 |
|
3,8020 |
0,58 |
8 |
-120 |
1,100 |
|
6,0256 |
0,78 |
4 |
-131 |
1000 |
|
10 |
1 |
0 |
-142 |
0,500 |
|
15,1356 |
1,18 |
-4 |
-153 |
-0,750 |
|
23,9883 |
1,38 |
-8 |
-165 |
-0,700 |
|
38,0189 |
1,58 |
-12 |
-175 |
-0,5 |
|
60,2559 |
1,78 |
-16 |
-185 |
-0,280 |
|
95,4992 |
1,98 |
-20 |
-195 |
-0,120 |
|
151,3561 |
2,18 |
-24 |
-208 |
-0,060 |
|
239,8833 |
2,38 |
-28 |
-221 |
-0,030 |
По известному графику P(ω) можно получить переходную функцию ℎ(t) по приближённому графоаналитическому методу В. В. Солодникова построения кривой переходного процесса. Суть метода состоит в том, что график P(ω) разбивается на типовые трапеции. Затем для каждой трапеции на основании заранее составленных таблиц h-функций, строят график переходной функции. Искомую переходную функцию находят алгебраическим суммированием ординат отдельных составляющих.
 Рис.10.
Вещественная частотная характеристика
замкнутой системы
Рис.10.
Вещественная частотная характеристика
замкнутой системы
Характеристику P(ω) разбивают на трапеции. Для этого действительную характеристику P(ω) заменяют приближённо прямолинейными отрезками и концы каждого отрезка соединяют с осью ординат прямыми, параллельным оси абсцисс. Более тщательно необходимо аппроксимировать характеристику при низких частотах. Её конечную часть с ординатами менее 0,1P(0) можно не принимать во внимание. Имеется 5 геометрических фигур: AБВ, AБДГ, ГДЗЖ, ЖЗИЕ, ЕИКД.
Затем определяют параметры трапеций. Для каждой i-й трапеции по графику находят частоты ωai, ωni и высоту Pi. По значениям ωai и ωni определяют коэффициенты наклона χi = ωai / ωni. Величину Pi считают положительной, если меньшая параллельная сторона трапеции расположена выше большей, и отрицательной в противоположном случае. Сумма высот всех трапеции равна P(0) = 1. Параметры ωai, ωni, χi, Pi каждой трапеции занесены в таблицу 2.
Таблица 2.
|
|
1 (АБВ) |
2 (ABED) |
3 (DEFG) |
4 (FGHI) |
5 (HIKM) |
|
ωai |
0,685 |
3,78 |
10 |
15 |
38 |
|
ωni |
3,78 |
10 |
15 |
38 |
80 |
|
χi |
0,1812 |
0,378 |
0,7 |
0,4 |
0,5 |
|
Pi |
-0,070 |
0,600 |
1,250 |
-0,248 |
-0,493 |
Для определения составляющих переходной характеристики в таблице h-функций для каждой i-й трапеции находят столбец, соответствующий значению χi. Затем для ряда значений условного времени τ определяют соответствующие им значения h(τ). По значениям τ и h(τ) вычисляют переходной характеристики:
t = τ / ωni ; hi (t) = Pi h(τ).
Значения τ и ℎ(τ) из таблицы h-функций для каждой i-й трапеции и вычисленные t и hi(τ) занесены в таблицу 3.
По данным таблицы 3 строят графики составляющих hi(t) переходной характеристики (рис. 11). Все составляющий располагаются на одном графике, знак каждой из них определяется знаком высоты соответствующей трапеции.
Для построения графика переходной характеристики h(t) суммируют ординаты всех составляющих hi(t) (рис.11).
h1(t)
Рис.11. Переходная характеристика и её составляющие