

7.5. Микропроцессорный горочный комплекс кгм
Система КГМ разработана коллективом ученых и конструкторов РИИЖТа и Ростовского филиала ВНИИЖТа. Она решает в комплексе задачи, свойственные системам ГАЦ-КР, АРС, АЗСР, ГПЗУ, и отличается от них расширенными функциональными возможностями, программно-аппаратурной гибкостью, относительно высокой скоростью информации, наличием сервисного оборудования, простотой и удобством обслуживания. Система КГМ осуществляет автоматическую установку стрелок по маршрутам скатывания отцепов, контроль хода роспуска с отображением технологических ситуаций на экранах цветного и черно-белых дисплеев, регулирование скоростей движения отцепов по всем тормозным позициям, расчет переменной скорости роспуска и контроль расцепа отцепов с учетом определения физических вагонов и их инвентарных номеров, непрерывное протоколирование работы системы, регистрацию сбоев и отказов постовых и путевых устройств, включая ручные вмешательства эксплуатационного персонала. Комплекс КГМ задействован в автоматизированную систему управления сортировочной станцией (АСУ СС), что освобождает дежурный персонал от рутинных задач ввода маршрутов и передачи исполненной программы в АСУ СС.
Элементной базой системы КГМ являются микропроцессорные средства диспетчеризации, автоматики и телемеханики МикроДАТ. Конструктивно функциональные элементы выполнены в виде отдельных печатных плат с микросхемами. Их компоновка осуществлена по типу модулей (до 20 разновидностей), размещенных в 11 блоках (каркасах), последние установлены в трех компоновочных шкафах, соответствующих подсистемам "Маршрут", "Скорость", "Диспетчер". Каждый компоновочный шкаф имеет кроссовое поле для подключения внешних кабелей. На кроссовых стативах размещены устройства согласования сигналов, обеспечивающие взаимодействие локальных подсистем с технологическим оборудованием. Примеры выполнения увязки микропроцессорных модулей с релейными устройствами (по вводу дискретных сигналов и их выводу) показаны на рис. 7.19. Здесь модуль М1 контролирует свободность стрелочной секции, а модуль М3 выдает команды на перевод стрелки. Преобразование сигналов осуществляется с использованием оптронов VE, обеспечивающих гальваническую развязку.
Р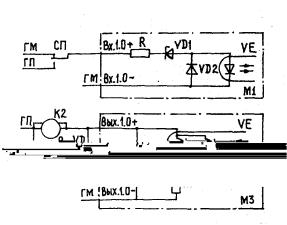 ис.
7.19. Схемы увязки микропроцессорных
модулей
ис.
7.19. Схемы увязки микропроцессорных
модулей
с устройствами СЦБ
Вся спускная часть горки разбивается на ряд зон автоматизации, в пределах которых решается законченная задача по управлению и контролю за технологическим процессом в соответствии с требованиями алгоритмов (рис. 7.20). Каждая зона оборудуется определенным комплектом датчиков и исполнительных устройств.
Головная зона содержит три комплекта спаренных путевых датчиков типа ДП50-80, короткую (3,5 м) рельсовую цепь, весомер и фотоэлектрические устройства. Этот комплекс позволяет надежно фиксировать проход любого отцепа, в том числе при отказах какого-либо датчика и сбоя в счете осей. На стрелках и контрольных участках размещены также датчики ДП50-80, в пределах тормозных позиций радиолокационные измерители скорости РИС-В2. Пути подгорочного парка оборудованы устройствами КЗП-ВНИИЖТ.
Подсистема "Маршрут" содержит четыре микропроцессорных блока Б1-Б4. Первый из них обрабатывает сигналы, поступающие от путевого оборудования головной зоны, пучковых стрелок и первой тормозной позиции; обеспечивает слежение за правильностью скатывания отцепов, управление головной и двумя пучковыми стрелками и первой тормозной позицией (интервальное регулирование). Блоки Б2 и Б3 осуществляют слежение за правильностью скатывания отцепов соответственно в пределах первоговторого и третьегочетвертого пучков и управление входящими в эти зоны стрелками и замедлителями второй тормозной позиции (интервально-прицельное регулирование). Блок Б4 связан с контрольным участком перед головной стрелкой и формирует информацию, необходимую для управления всеми стрелками и замедлителями; классифицирует отцепы по ходовым свойствам, рассчитывает переменную скорость роспуска и управляет горочным светофором и маршрутными указателями; прослеживает отрыв вагонов и формирование отцепов согласно программе; фиксирует на телетайпе ТЛТ2 сбои, отказы системы и ручные вмешательства дежурного по горке П1 и горочного оператора П2.
Р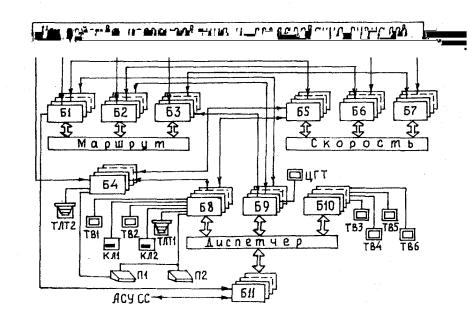 ис.
7.20. Техническая структура КГМ
ис.
7.20. Техническая структура КГМ
Подсистема "Скорость" содержит три микропроцессорных блока Б5-Б7, обеспечивающих прицельное регулирование скорости скатывания отцепов в зоне третьей тормозной позиции с учетом данных КЗП. Блок Б5 обеспечивает сбор всей информации о ходе роспуска, расчетных и фактических скоростях, состоянии участков, стрелок и замедлителей и передачу ее в подсистему "Диспетчер" для отображения на дисплеях и протоколирования на телетайпе. Блоки Б6 и Б7 осуществляют расчет скоростей выхода отцепов и управление замедлителями третьей тормозной позиции соответственно в пределах первого второго и третьего четвертого пучков.
Подсистема "Диспетчер" содержит четыре микропроцессорных блока Б8-Б11. Блок Б8 служит для обеспечения оперативного диалога с ЭВМ дежурного по горке (через клавиатуру КЛ1 и дисплей ТВ1) и маневрового диспетчера (через клавиатуру КЛ2 и дисплей ТВ2), а также распечатки на телетайпе ТЛТ1 заданной и исполненной программ роспуска. Блок Б9 используется для организации индикации на цветном графическом терминале (ЦГТ) состояния напольных устройств и исполнительных механизмов и формирования сообщений о сбоях системы или подсистем и переходе на резервное управление. Блок Б10 осуществляет выдачу индикации на черно-белые дисплеи ТВ3-ТВ6. Блок Б11 служит для организации двусторонней связи с АСУ СС, хранения подготовленных программ роспуска с инвентарными номерами вагонов (до четырех составов) и данных о накоплении вагонов на путях сортировочного парка.
Дальнейшее развитие системы КГМ связывается с заменой устаревших модулей средств МикроДАТ, установкой дополнительных микроЭВМ с мощными вычислительными возможностями для автоматизации процесса формирования поездов, разработкой микропроцессорной системы ТГЛ.
Библиографический список
1. Акита К. и др. Разработка системы микропроцессорной централизации SMILE // Железные дороги мира. 1987. № 8. С. 42-44.
2. Устройства управления стрелочными электроприводами трехфазного тока / А.И. Баженов, Ю.А. Однопозов, П.И. Марута, Л.Ф. Кондратенко, Е.М. Карасев // Автоматика, телемеханика и связь. 1986. № 1. С. 3-5.
3. Брауэр Х. Система микропроцессорной централизации фирмы AEG // Железные дороги мира. 1987. № 8. С. 37-42.
4. Булкин Н.А. Построение централизации стрелок и сигналов на цифровой вычислительной машине // Вопросы автоматики, телемеханики вычислительной техники на железнодорожном транспорте. М.: Транспорт, 1966. С. 60-71.
5. Велтистов П.К. Схемы релейной централизации малых станций. М.: Транспорт, 1969. 192 с.
6. Радиолокационный измеритель скорости движения отцепов / А.М. Вериго, Ю.В. Ваванов, Ф.А. Тенн, Н.А. Подоров // Автоматика, телемеханика и связь. 1983. № 3. С. 7-9.
7. Виглин С.И., Комиссарчук Н.А., Лихачев А.И. Способ формирования маршрута в микропроцессорной системе централизованного управления стрелками и сигналами // Автоматизированные системы управления технологическими процессами на железнодорожных станциях: Межвуз. сб. науч. тр. / Днепропетровский ин-т инж. ж.-д. трансп. Днепропетровск, 1980. Вып. 211/9. С. 124-127.
8. Внедрение и опыт эксплуатации систем микропроцессорной централизации // Железные дороги мира. 1987. № 2. С. 32-43. (Обозрение железнодорожной техники. 1985. № 11. С. 787-791, 794-796, 805-810, 815-816).
9. Водякин В.Д. Сортировочным горкам прогрессивную технику и технологию обслуживания // Автоматика, телемеханика и связь. 1996. № 1. С. 19-22.
10. Вологдин Л.А. Вагонные замедлители // Автоматика, телемеханика и связь. 1981. № 12. С. 9-12.
11. Глащенков Г.А. Электрическая централизация стрелок и сигналов на основе комплексов системы малых электронных вычислительных машин // Автоматизированные системы управления технологическими процессами на железнодорожных станциях: Межвуз. сб. науч. тр. / Днепропетровский ин-т инж. ж.-д. трансп. Днепропетровск, 1980. Вып. 211/9. С. 109-116.
12. Гоголев А.П. Новые разработки в области сигнализации, централизации и блокировки // Автоматика, телемеханика и связь. 1993. № 5. С. 2-8.
13. Дмитриев В.Р., Крупицкий А.З., Цейко Л.П. Новое в системах электрической централизации // Автоматика, телемеханика и связь. 1978. № 7. С. 10-13.
14. Компьютерная централизация стрелок и сигналов / В.Ю. Ефимов, А.А. Прокофьев, Б.П. Денисов, Б.Л. Горбунов // Автоматика, телемеханика и связь. 1979. № 1. С. 6-9.
15. Ефремов А.Ю. Микропроцессорные централизации // Автоматика, телемеханика и связь. 1986. № 5. С. 45-47.
16. Иванченко В.Н. Микропроцессорная система автоматизации сортировочной горки // Автоматика, телемеханика и связь. 1987. № 9. С. 31-34.
17. Казаков А.А., Бубнов В.Д., Казаков Е.А. Станционные устройства автоматики и телемеханики: Учебник для техникумов ж.-д. трансп. М.: Транспорт, 1990. 431 с.
18. Каргалов Н.И., Елисеев В.В. Работа устройств ЭЦ с электроприводом переменного тока // Автоматика, телемеханика и связь. 1975. № 10. С. 22-24.
19. Перспективный клещевиднонажимной вагонный замедлитель с пневматическим приводом / В.А. Кобзев, В.А. Утенков, С.А. Глухов и др. // Автоматика, телемеханика и связь. 1991. № 7. С. 12-14.
20. Модернизация замедлителя РНЗ-2М с учетом нового габарита / В.А. Кобзев, В.В. Дьяченко, В.А. Утенков и др. // Автоматика, телемеханика и связь. 1996. № 1. С. 22-24.
21. Горочный вагонный замедлитель ВЗП, модернизированный с учетом нового габарита / В.А. Кобзев, С.И. Тихов, и др. // Автоматика. телемеханика и связь. 1996. № 5. С. 30, 31.
22. Кокурин И.М., Кондратенко Л.Ф. Эксплуатационные основы устройств железнодорожной автоматики и телемеханики: Учебник для вузов ж.-д. трансп. 2-е изд., перераб. и доп. М.: Транспорт, 1989. 182 с.
23. Определение основных параметров и характеристик микропроцессорной системы электрической централизации стрелок и сигналов / Н.А. Комиссарчук, А.И. Лихачев, В.Г. Васильев, и др. //Автоматизированные системы управления технологическими процессами на железнодорожных станциях: Межвуз. сб. науч. тр. / Днепропетровский ин-т инж. ж.-д. трансп. Днепропетровск, 1980. Вып. 211/9. С. 127-131.
24. Кондратенко Л.Ф., Кононов В.А. Значение реверсирующего реле в схемах управления стрелочными электроприводами // Автоматика, телемеханика и связь. 1971. № 12. С. 22,23.
25. Системы микропроцессорной централизации / Н.Ф. Котляренко, В.А. Гладков, В.Г. Скобелев и др. // Автоматика, телемеханика и связь. 1984. № 11. С. 44-46.
26. Общая концепция построения централизации стрелок и сигналов на микропроцессорах / Н.Ф. Котляренко, С.И. Виглин, В.А. Гладков и др. // Бюллетень ОСЖД. Варшава. 1986. № 4. С. 5-9.
27. Горочная автоматическая централизация с контролем роспуска / Г.А. Красовский, В.В. Колчин, И.В. Нейшильд и др. // Автоматика, телемеханика и связь. 1977. № 8. С. 8-11.
28. Развитие устройств централизованного управления сортировочной горкой / Г.А. Красовский, И.Л. Дубрава, А.П. Гоголев и др. // Автоматика, телемеханика и связь. 1982. № 9. С. 12, 13.
29. Крупицкий А.З. Совершенствование устройств электрической централизации // Автоматика, телемеханика и связь. 1983. № 1. С. 13-15.
30. Лебедев М.М. НИИЖА: Результаты деятельности и перспективы // Автоматика, телемеханика и связь. 1996. № 2. С. 2-6.
31. Модин Н.К. Механизация и автоматизация станционных процессов. М.: Транспорт, 1985. 224 с.
32. Муха Ю.А., Цымбалюк С.К., Щербаков Е.В. Вагонный рычажно-зажимной замедлитель РНЗ-2 // Автоматика, телемеханика и связь. 1983. № 9. С. 2-4.
33. Никифоров Н.А. Система автоматического регулирования скорости скатывания отцепов на сортировочной горке (АРС) // Автоматика, телемеханика и связь. 1994. № 12. С. 14, 15.
34. Принципы построения схем электрической централизации на феррит-транзисторных модулях / А.С. Переборов, В.В. Сапожников, Вл.В. Сапожников и др. // Автоматика, телемеханика и связь. 1976. № 5. С. 5-8.
35. Переборов А.С., Борисенко Л.И., Хренов Л.М. Маршрутный набор на транзисторных элементах // Автоматика, телемеханика и связь. 1967. № 12. С. 3-8.
36. Пресняк С.С., Запорожченко Е.Г., Цыркин А.В. Отечественная микропроцессорная централизация // Автоматика, телемеханика и связь. 1998. № 1. С. 6, 7.
37. Применение вычислительной техники в системах централизации // Железные дороги мира. 1987. № 3. С. 49-54.
38. Развитие автоматики, телемеханики и связи на железных дорогах / Б.С. Рязанцев, Д.А. Бунин, Н.З. Шацев, Н.М. Степанов; Под. Ред. Б.С. Рязанцева. М.: Транспорт, 1986. 279 с.
39. Резников Ю.М. Электроприводы железнодорожной автоматики и телемеханики. М.: Транспорт, 1985. 288 с.
40. Сагайтис В.С., Соколов В.Н. Устройства механизированных и автоматизированных сортировочных горок: Справочник. 2-е изд., перераб. и доп. М.: Транспорт, 1968. 208 с.
41. Фотоэлектрическое устройство для контроля проследования подвижного состава / А.И. Семьянских, В.И. Жуков, В.К. Васин и др. // Автоматика, телемеханика и связь. 1983. № 3. С. 10-13.
42. Слюсарь А.Ф., Ничипоренко А.Н. Октябрьская дорога и ГТСС партнеры в проектировании новых систем автоматики и связи // Автоматика, телемеханика и связь. 1996. № 6. С. 26-28.
43. Станционные системы автоматики и телемеханики: Учебник для вузов ж.-д. трансп. / Вл.В. Сапожников, Б.Н. Елкин, И.М. Кокурин и др.; Под ред. Вл.В. Сапожникова. М.: Транспорт, 1997. 432 с.
44. Схемы маршрутной релейной централизации МРЦ-13: Типовые проектные решения 501-0-98 / Ин-т "Гипротранссигналсвязь". Л., 1978.
45. Талалаев В.И. Железнодорожная автоматика, связь, вычислительная техника: проблемы и перспективы // Автоматика, телемеханика и связь. 1996. № 1. С. 10-12.
46. Усовершенствованная электрическая централизация УЭЦ-М: типовые проектные решения 51094-00-00 / Главное управление сигнализации, связи и вычислительной техники. М., 1988.
47. Фонарев Н.М. Автоматизация процесса расформирования составов на сортировочных горках. М.: Транспорт, 1971. 272 с.
48. Хоменков А.Н., Хусаинов В.М. Электрическая централизация малых станций ЭЦ-К // Автоматика, телемеханика и связь. 1995. № 7. С. 7, 8.
49. Хоменков А.Н., Хилькевич И.А. Усовершенствованная электрическая централизация на новой элементной базе // Автоматика, телемеханика и связь. 1983. № 7. С. 19-21.
50. Хоменков А.Н., Королев Н.Г. Усовершенствованная система ЭЦ // Автоматика, телемеханика и связь. 1988. № 9. С. 17-21.
51. Цейко Л.П. Новые схемы электрической централизации промежуточных станций // Автоматика, телемеханика и связь. 1981. № 10. С. 7-10.
52. Шелухин В.И., Малышев И.Н. Блок автоматического управления замедлителями тормозных позиций // Автоматика, телемеханика и связь. 1995. № 8. С. 10-12.
53. Шелухин В.И. Радиолокационный измеритель скорости нового поколения // Автоматика, телемеханика и связь. 1996. № 1. С. 37.
54. Электрическая централизация промежуточных станций с маневровой работой ЭЦ-12-83: Типовые проектные решения 501-05-46.84 / Ин-т "Гипротранссигналсвязь". Л., 1984.
55. Электрическая централизация с индустриальной системой монтажа: Техническое описание 418901-ООТО / Ин-т "Гипротранссигналсвязь". Л., 1989.