

7.3.2. Теоретические основы конструкций зажимающих
вагонных замедлителей
Для выявления факторов, влияющих на конструкцию зажимающих вагонных замедлителей, рассмотрим расчетную схему, представленную на рис. 7.10.
Р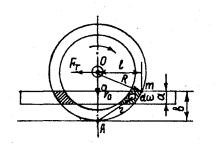 ис.
7.10. Расчетная схема силы торможения
ис.
7.10. Расчетная схема силы торможения
двухсилового нажимного замедлителя
Сила трения, приложенная к любой элементарной площадке d на поверхности давления шины и колеса
![]() ,
,
где f коэффициент трения;
Рк среднее значение силы нажатия шины на колесо;
площадь поверхности соприкосновения шины и колеса.
Обозначим мгновенный радиус поворота площадки d относительно мгновенного центра качения А через r. Тогда момент трения определится как
![]() ,
,
а полный (для двух заштрихованных полусегментов):
![]() ,
,
где интеграл представляет собой статический момент всей заштрихованной площади относительно точки А. Обозначив расстояние от центра ее тяжести до точки А через r и решая интеграл по частям, получим
![]()
![]() .
.
Из равенства тормозного момента и момента трения имеем:
![]() .
.
Отсюда легко определяется тормозная сила нажимного замедлителя, отнесенная к одной колесной паре (оси) с учетом четырех шин:
![]() , (7.10)
, (7.10)
где коэффициент приведения, который условно "переносит" тормозную силу, создающуюся на ободе колеса, к ее оси.
Коэффициент трения f зависит от рода материала, из которого сделаны шины, состояния трущихся поверхностей (сухие, мокрые, покрытые маслом). В расчетах рекомендуется принимать f = 0,1.
Коэффициент приведения тем больше, чем выше уровень тормозной шины в и меньше ее ширина а. Значение в ограничивается габаритом подвижного состава. С введением в 1994 г. нового пункта в Инструкцию по применению габаритов предельное возвышение тормозных шин над уровнем головки рельса (УГР) устанавливается в пределах 100-110 мм вместо прежних 110-120 мм. Использование для тормозных балок слишком узких шин ускоряет износ последних, поэтому обычно принимают а = 50 мм.
Сила нажатия Рк зависит от давления воздуха в цилиндрах, связанных с тормозными балками. Однако чрезмерно увеличивать ее нельзя, так как при некоторых критических значениях Рк может произойти выдавливание (выжимание) вагонных колес или выкрашивание кромки бандажа.
При выжимании вокруг мгновенного центра вращения колеса m имеет место равенство моментов максимальной силы торможения и силы тяжести:
![]() ,
,
откуда
![]() (7.11)
(7.11)
где
![]() вес вагона,
приходящийся на одну ось.
вес вагона,
приходящийся на одну ось.
После подстановки в левую часть выражения (7.11) значения Fонм из (7.10) и решения его относительно максимальной силы нажатия имеем:
![]() . (7.12)
. (7.12)
Для существующих вагонных замедлителей расчеты по (7.12) дают значение Ркм < 4qо.
Зная длину замедлителя lт, в пределах которой реализуется сила нажатия Рк, можно определить работу торможения
![]() , (7.13)
, (7.13)
а также погашаемую замедлителем энергетическую высоту
![]() , (7.14)
, (7.14)
где n число осей в отцепе;
Q вес тормозимого отцепа.
Р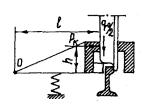 ис.
7.11. Расчетная схема силы торможения
ис.
7.11. Расчетная схема силы торможения
трехсилового весового замедлителя
Согласно расчетной схеме торможения весового замедлителя (рис. 7.11) относительно точки поворота тормозной балки О действуют моменты сил
![]() ,
,
где l, h плечи рычага весового замедлителя.
Отсюда
![]() , (7.15)
, (7.15)
где
![]() коэффициент передачи
замедлителя.
коэффициент передачи
замедлителя.
Подставляя значение Рк из (7.15) в (7.10), для рассматриваемого случая получим:
![]() , (7.16)
, (7.16)
где = 2f k тормозная характеристика замедлителя.
Таким образом, сила нажатия на колесо прямо пропорциональна нагрузке на него. Работа торможения и погашаемая замедлителем энергетическая высота определяются по формулам:
![]() ; (7.17)
; (7.17)
![]() . (7.18)
. (7.18)
Весовые замедлители мощнее нажимных, что объясняется более высоким значением коэффициента . Кроме того, они принципиально не допускают выжимания вагонов.