

4. Биолокационный метод
Физический и биологический мир – два параллельно существующих мира со своими проблемами, задачами и приемами их решения, требующего различной оценки. Биолокационный метод (БЛМ) основан на использовании биоорганизмов в качестве датчика при изучении земных недр и осуществляется с помощью восприятия внешних воздействий поверхностью тела или специальными органами чувств. Он основан на использовании биолокационного эффекта (БЛЭ) или эффекта вращения рамки для решения различных задач (гидрогеологических, инженерно-геологических, при поиске и разведке месторождений полезных ископаемых, геокартировании, в археологии, в медицине, при обнаружении геопотагенных зон и т.д.) и дополняет геофизические и геохимические методы. БЛЭ является эффектом системы человек – среда – рамка. Способностью к биолокационному эффекту обладает значительный процент людей (90 – 95 %) [24, 34].
4.1. Средства биолокационного эффекта
К ним относят различные конструкции рамок. В мировой практике в основном известны две конструкции рамок: П-образная, которая переносится двумя руками (рис. 4.1, А; Б; В) и Г-образная (см. рис. 4.1, Г; Д; Е и Ж) – для одной руки. Рамки изготавливаются из алюминиевой, медной или железной проволоки диаметром 2 – 4 мм и состоят из рукоятки и чувствительного плеча.
Рамки типа А, Б, В имеют горизонтальную ось вращения и переносятся в двух руках. Ведется подсчет оборотов. Положительным принято считать вращение рамки вверх из первоначального горизонтального положения (от оператора), обратное вращение (вниз) принято считать отрицательным (рис. 4.2, а). Рамки типов Г, Д, Е (см. рис. 4.1, 4.2) переносятся в одной руке, имеют вертикальную ось вращения.

Рис.
4.1. Типы рамок индикаторов для
количественной оценки БЛЭ
Положительным принято считать вращение или отклонение рамки по ходу часовой стрелки в левой и против хода часовой стрелки в правой руке. Обратное направление вращения рамки принято условно называть отрицательным.
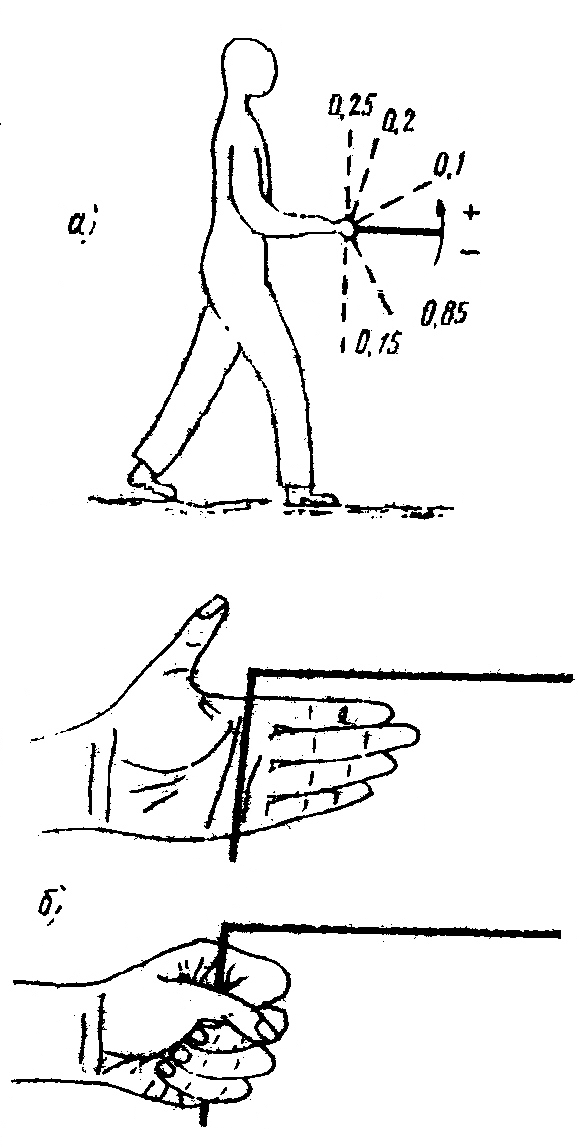
Рис.
4.2. Измерение БЛЭ с помощью рамки с
горизонтальной осью вращения (а);
положение рамки с вертикальной осью
вращения в открытой ладони и в рабочем
положении (б).
Любая рамка в исход- ном рабочем положении находится в механичес-
ком неустойчивом равновесии, т. е. выступающая часть рамки уравновешивается мускульной силой руки, изменение которой и создает механический момент отклонения или вращения (см. рис. 4.2, б). Каждый оператор методом подбора находит наиболее удобную для себя конструкцию рамки.
Маятник представляет из себя небольшой металлический грузик (кроме алюминия), подвешенный на нитке и способный под действием невидимых сил раскачиваться в разные стороны (рис. 4.3). Можно запрограммировать до 20 движений маятника: горизонтальное, вертикальное, диагональное, круги и эллипсы по часовой и против часовой стрелки. Всем движениям можно задать соответствующий ответ.

Рис.
4.3. Различные
типы
маятников,
используемых в биолокации