Приведение масс
Приведенный
момент инерции определяем из условия
равенства кинетической энергии звена
приведения (кривошипа) и всех звеньев
механизма. Для рассматриваемого
механизма приведенный момент инерции
определится из формулы:
 , где
, где
 ,
-приведенный момент инерции звеньев,
связанных с кривошипом постоянным
передаточным отношением,
,
-приведенный момент инерции звеньев,
связанных с кривошипом постоянным
передаточным отношением,
 - приведенный момент инерции остальных
звеньев.
- приведенный момент инерции остальных
звеньев.
Для рассматриваемого механизма:

Заменяя отношение скоростей отношениями отрезков планов, получим:

Массы и моменты инерции звеньев:






Строим
график
 ,
масштаб
,
масштаб


Определение момента инерции маховика
Потребный
момент инерции маховика
 находится
по заданному значению коэффициента с
учетом средней угловой скорости кривошипа
и распределения инерционных силовых
параметров машинного агрегата, учитываемых
приведенными моментами инерции сил.
Для синтеза маховика по методу Мерцалова
вычисляется кинетическая энергия
находится
по заданному значению коэффициента с
учетом средней угловой скорости кривошипа
и распределения инерционных силовых
параметров машинного агрегата, учитываемых
приведенными моментами инерции сил.
Для синтеза маховика по методу Мерцалова
вычисляется кинетическая энергия
 ,
Дж звеньев, не связанных с кривошипом
постоянным передаточным отношением по
формуле:
,
Дж звеньев, не связанных с кривошипом
постоянным передаточным отношением по
формуле:

Результаты
расчета для каждого
положения
механизма заносим в таблицу. Выбрав
масштабный коэффициент
 строим
график
строим
график
 Зависимость
Зависимость
 имеет
такой же вид, как и
имеет
такой же вид, как и
 так
как
так
как
 ,
а масштабный
коэффициент
,
а масштабный
коэффициент
 .
.
Далее
строим зависимость
 путем
сложения с учетом знаков графиков
путем
сложения с учетом знаков графиков
 и
и
 Затем
из графика
Затем
из графика
 вычитаем
график
.
вычитаем
график
.
Полученная
кривая
 есть
зависимость приращения кинетической
энергии звеньев механизма,
связанных
с кривошипом постоянным передаточным
отношением, от угла поворота звена
приведения .
На
построенной кривой
есть
зависимость приращения кинетической
энергии звеньев механизма,
связанных
с кривошипом постоянным передаточным
отношением, от угла поворота звена
приведения .
На
построенной кривой
 находим
наибольший максимум и наибольший
минимум, разность между которыми а =
86мм, позволяет вычислить наибольший
размах изменения кинетической энергии
находим
наибольший максимум и наибольший
минимум, разность между которыми а =
86мм, позволяет вычислить наибольший
размах изменения кинетической энергии

Приведенный
момент инерции
кг.м2
звеньев,
связанных с кривошипом постоянным
передаточным
отношением, находим по формуле:
 м2
м2
где
 – коэффициент
неравномерности движения.
– коэффициент
неравномерности движения.
В
данном случае выбираем
из условия работы асинхронной электрической
машины в двигательном режиме:
 . Допускаемое значение коэффициента
неравномерности принимается меньшему
из двух величин:
. Допускаемое значение коэффициента
неравномерности принимается меньшему
из двух величин:


где  - синхронная частота вращения ротора
- синхронная частота вращения ротора
 -
средняя частота вращения ротора
-
средняя частота вращения ротора
 – критическая
частота вращения ротора
– критическая
частота вращения ротора

где


Где
номинальный вращающий момент
 ,
а средний вращающий момент
,
а средний вращающий момент
 .
Откуда:
.
Откуда:

После
вычисления получим:
 ;
;
 .
Примем
.
Примем

Значение
,
включает в себя в общем случае приведенный
к валу кривошипа
момент
инерции ротора электродвигателя
 м2(по
каталогу); приведенный момент инерции
м2(по
каталогу); приведенный момент инерции
 ,
учитывающий
массу муфт и зубчатых колес привода;
момент инерции кривошипа
,
учитывающий
массу муфт и зубчатых колес привода;
момент инерции кривошипа
 и
момент
инерции
и
момент
инерции
 маховика,
устанавливаемого на одном валу с
кривошипом. Поэтому
находим по
формуле:
маховика,
устанавливаемого на одном валу с
кривошипом. Поэтому
находим по
формуле:
 м2
м2
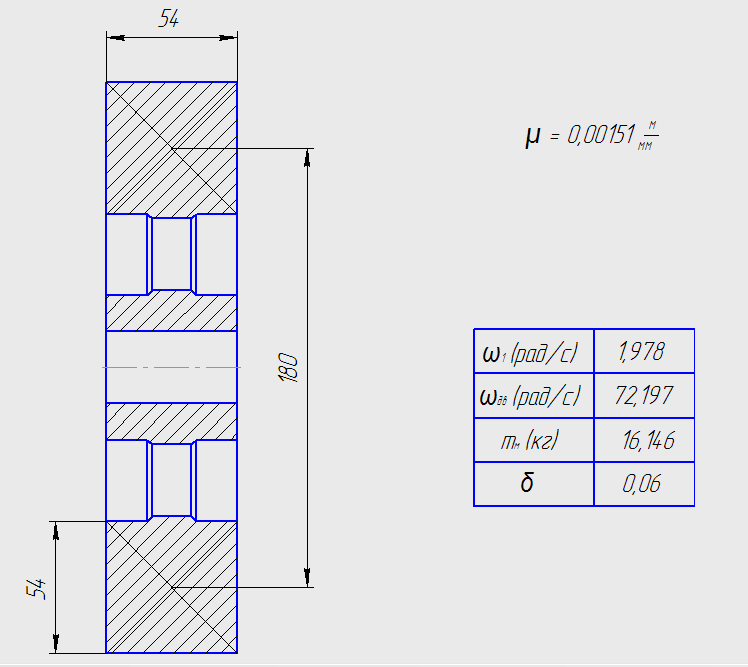
Конструирование маховика и определение места его установки в машинном агрегате
Для уменьшения массы и габаритов целесообразно применять конструкции. Маховика в виде тяжелого обода, связанного с насаживаемой на вал ступицей, спицами или облегченным диском. Для такого маховика момент инерции:

где
 и
и
 – соответственно масса и средний диаметр
обода; ρ -
плотность маховика,
– соответственно масса и средний диаметр
обода; ρ -
плотность маховика,
 и
и
 - отношение
ширины и высоты обода к его среднему
диаметру.
- отношение
ширины и высоты обода к его среднему
диаметру.
При
определении
предполагалось, что маховик размещен
на одном валу со звеном приведения,
совпадающим, как правило, с главным
валом рабочей машины. Из-за соображений
снижения массы и габаритов маховик
выгодно установить на более быстроходный
вал с угловой скоростью
 . Момент инерции размещенного на таком
валу маховика
. Момент инерции размещенного на таком
валу маховика

После перемещения маховика на другой вал получим:
 м2
м2
Принимаем = 0,3; = 0,3, ρ = 7800 кг/м3 и определяем диаметр:

Масса обода маховика определяется по следующей формуле:

С учетом массы спиц и ступицы масса маховика